

Detection system and method for six-degree-of-freedom spatial position and attitude
A technology of spatial position and detection system, which is applied in the direction of navigation, measurement device, surveying and navigation through speed/acceleration measurement, which can solve the problems of poor mobility and portability, low accuracy, and limited detection range, etc., and achieve improvement Accuracy and stability, increased range, improved mobility and portability effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
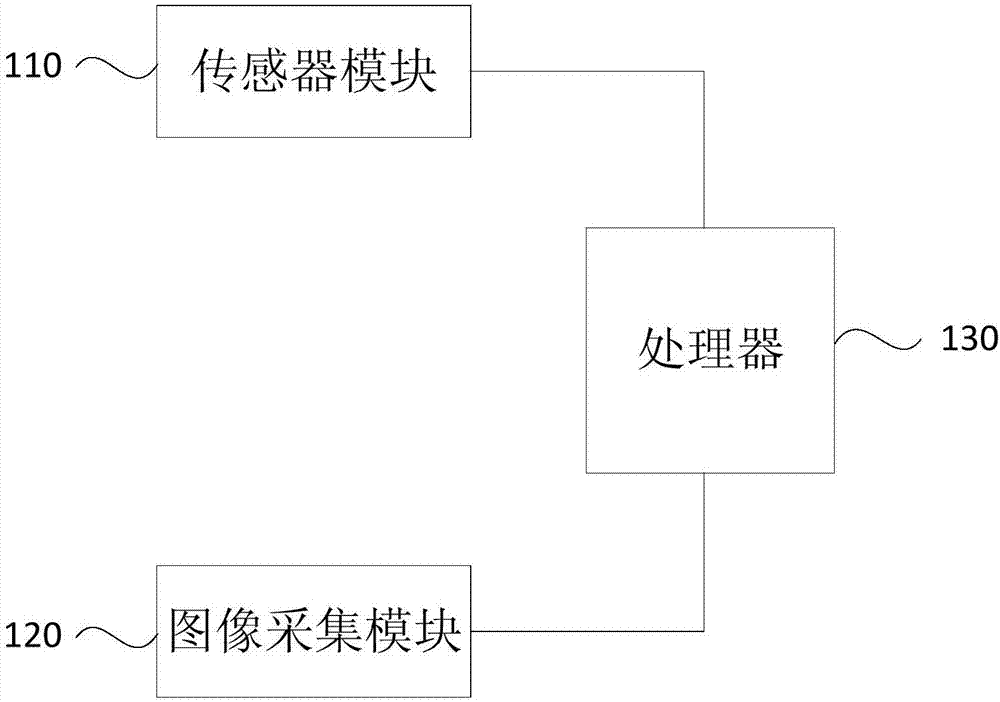
[0031] figure 1 It is a schematic structural diagram of a 6-DOF spatial position and attitude detection system provided by Embodiment 1 of the present invention. Such as figure 1 As shown, the detection system includes:
[0032] The sensor module 110, the image acquisition module 120 and the processor 130, the sensor module 110 and the image acquisition module 120 are all set on the measured object; the sensor module 110 and the image acquisition module 120 are respectively connected to the processor 130.
[0033] Different from the traditional installation method, in this embodiment, both the sensor module 110 and the image acquisition module 120 are installed on the object to be measured. Monitor the movement of the measured target.
[0034] In this embodiment, the sensor module 110 is preferably connected to the processor 130 through an SPI or I2C interface; the image acquisition module 120 is preferably connected to the processor 130 through a USB interface circuit.
...
Embodiment 2
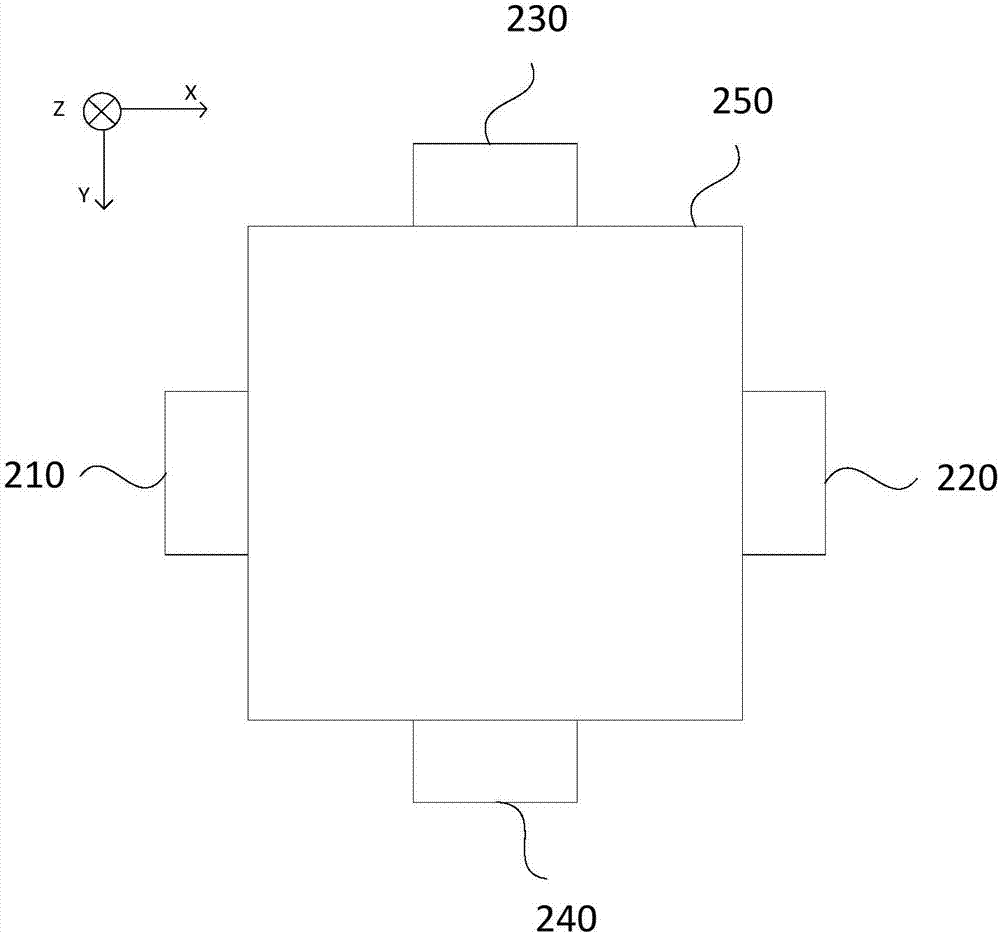
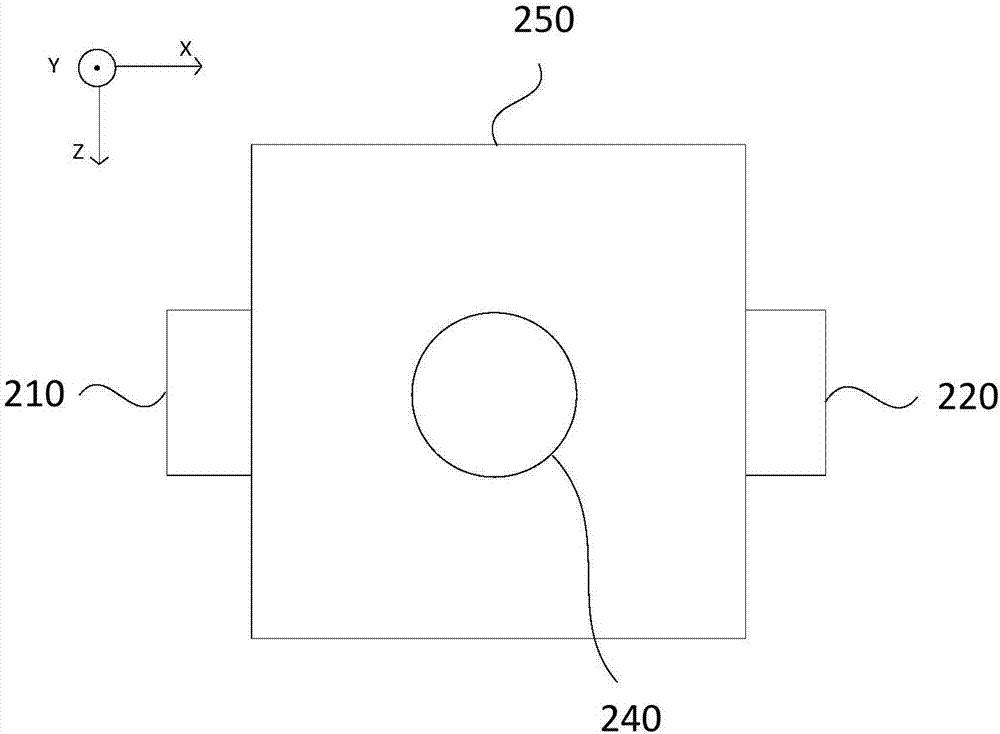
[0045] Figure 2a It is a structural top view of a 6-DOF spatial position and attitude detection system provided by Embodiment 2 of the present invention, Figure 2b It is a structural front view of a 6-DOF spatial position and attitude detection system provided by Embodiment 2 of the present invention, Figure 2a with Figure 2b The coordinate system shown in is the coordinate system of the sensor module. This embodiment is optimized on the basis of Embodiment 1, such as Figure 2a with 2b as shown,
[0046] The four sides of the detection system respectively include at least one camera.
[0047] In this embodiment, preferably, the sensor module, the image acquisition module and the processor can be integrated into a whole. Wherein, the detection system casing 250 can preferably be packaged into a cube or a cuboid shape, preferably the sensor module and the processor can be packaged inside the cube or cuboid shape detection system casing 250, wherein the sensor module can...
Embodiment 3
[0053] image 3 It is a flow chart of a method for detecting a 6-degree-of-freedom space position and attitude provided by Embodiment 3 of the present invention. The method can be executed by the processor of the detection system for a 6-degree-of-freedom space position and attitude in each of the above-mentioned embodiments, including :
[0054] Step 310, receiving raw data, the raw data includes sensory data and image data related to the position and posture of the measured object.
[0055] In this embodiment, the processor receives raw data, the raw data includes acceleration, angular velocity, distribution of magnetic field and image data, and the accelerometer, gyroscope, magnetometer and image acquisition module in the sensor module in each of the above-mentioned embodiments The cameras in are acquired and sent separately.
[0056] Step 320, performing data calibration, fusion or mutual compensation processing on the original data to obtain 6-DOF space position and att...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More