

Method for obtaining target distance and target intensity realized on the basis of 4D imaging photon counting laser radar system
A technology of photon counting and laser radar, which is applied in radio wave measurement system, re-radiation of electromagnetic waves, utilization of re-radiation, etc., can solve the problems of long time consumption, large amount of calculation, and low accuracy of intensity calculation, and achieve intensity calculation The effect of improving accuracy, improving efficiency, and simplifying the process of solving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
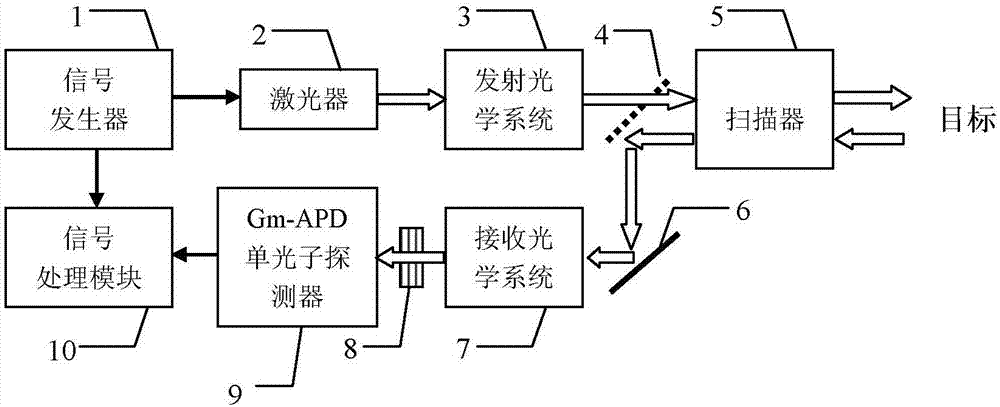
[0023] Specific implementation mode one: see figure 1 Describe this embodiment, the acquisition method of the target distance and target intensity based on the 4D imaging photon counting laser radar system described in this embodiment, the described 4D imaging photon counting laser radar system includes a signal generator 1, a laser 2, a transmitter Optical system 3, one-way reflector 4, scanner 5, total reflection mirror 6, receiving optical system 7, narrowband filter 8, Gm-APD single photon detector 9, signal processing module 10;
[0024] The composite modulated random pulse signal output terminal of the signal generator 1 is connected with the composite signal input terminal of the laser 2 and the composite signal input terminal of the signal processing module 10 at the same time, and the pulse signal output terminal of the laser 2 is connected with the pulse of the emission optical system 3 The signal input terminal is connected, the optical signal output by the transmit...
specific Embodiment approach 2
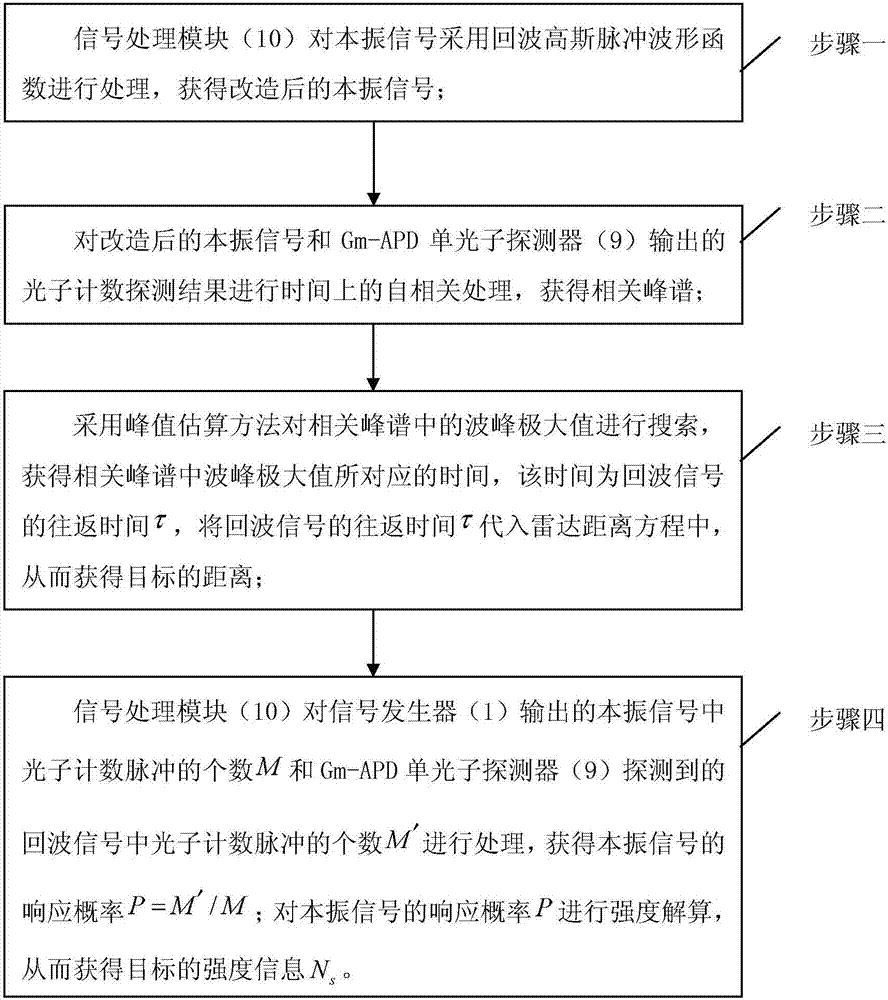
[0033] Specific implementation mode two: see figure 1 Describe this embodiment. The difference between this embodiment and the acquisition method of the target distance and target intensity based on the 4D imaging photon counting lidar system described in the first embodiment is that the described intensity calculation is realized by the following formula :
[0034] N s =-ln(1-P).
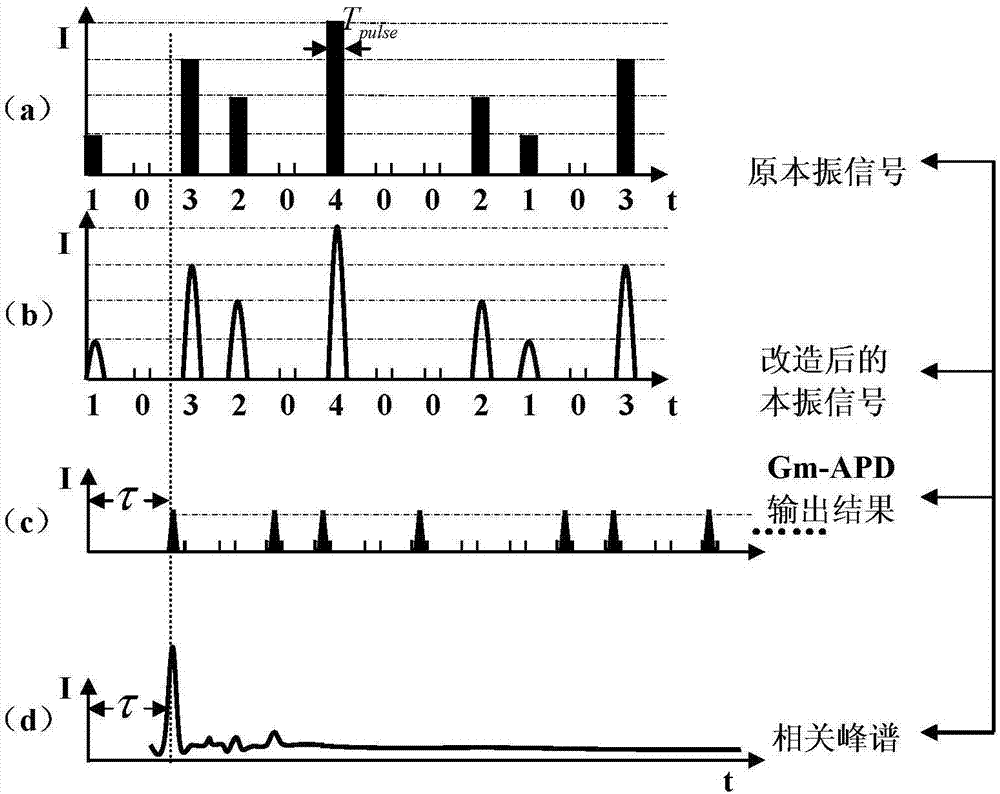
[0035] In this embodiment, if image 3 (a) The local oscillator signal consists of random distribution of pulses with different intensities. We use 1, 2...i...n to represent individual pulses of different intensities, and 1, 2...i...n is called encoding, which represents pulses of different intensities . A detection uses a pulse sequence, including M pulses, and this pulse sequence contains n kinds of pulses with different intensity modulations randomly distributed. Pulses of n different intensities appear with equal probability. Therefore, for a detected pulse sequence, M pulses of various in...
specific Embodiment approach 3
[0040] Specific implementation mode three: see figure 1 This embodiment is described. The difference between this embodiment and the method for acquiring the target distance and target intensity based on the 4D imaging photon counting lidar system described in the first embodiment is that the expression of the radar distance equation is: : R=cτ / 2; wherein, R is the distance value of the target, and c is the speed of light.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More