

Robot recognition and target tracking system for underwater robot
An underwater robot, target tracking technology, applied in the control/regulation system, instrument, non-electric variable control and other directions, can solve the problems of monotonous operation, difficult ROV motion control, easy operation by external interference, etc., to reduce the difficulty of work, The effect of improving maneuverability and adaptability to the environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
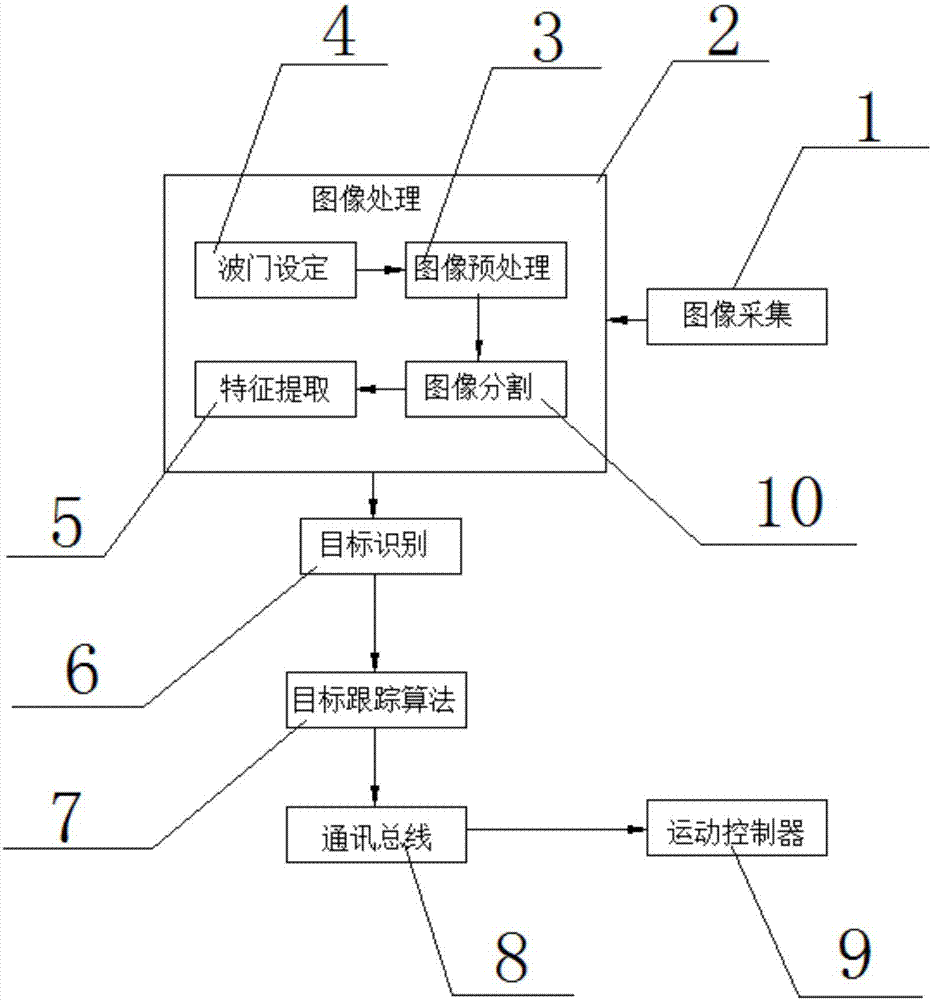
[0018] The invention provides an underwater robot image recognition and target tracking system, which can realize accurate search, recognition, positioning and tracking of target areas by using image recognition and tracking technology, and improves the controllability and environmental autonomy of the underwater robot. The adaptability reduces the difficulty of the operator's work, enabling the fine observation and operation of the micro underwater robot in a complex environment.
[0019] In order to better understand the above-mentioned technical solution, the above-mentioned technical solution will be described in detail below in conjunction with the accompanying drawings and specific implementation methods.
[0020] Such as figure 1 As shown, an underwater robot image recognition and target tracking system is characterized in that it includes an image acquisition module 1, an image processing module 2, a target recognition module 6, a target tracking module 7, a communicat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More