

Cable parallel driving based offshore cage cleaning robot and cleaning method
A technology for cleaning robots and deep-sea cages, applied in chemical instruments and methods, cleaning methods and utensils, manipulators, etc., can solve the problems of cables being easily affected by water flow, inaccurate positioning, limited flexibility, etc. The effect of water flow, the effect of improving positioning accuracy, increasing stability and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
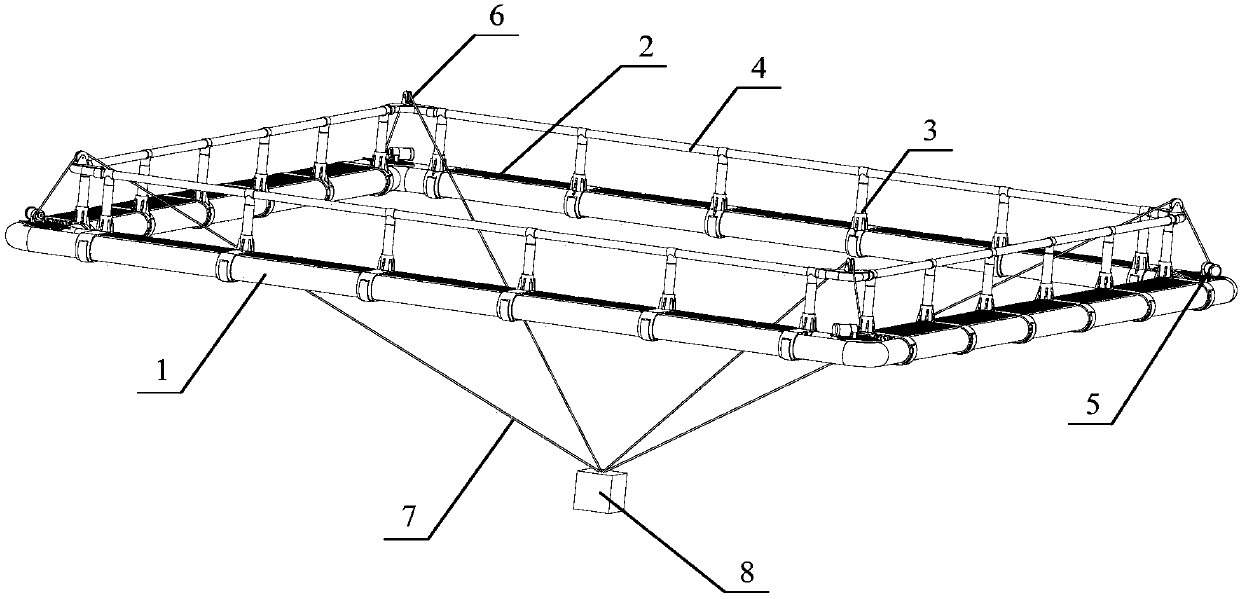
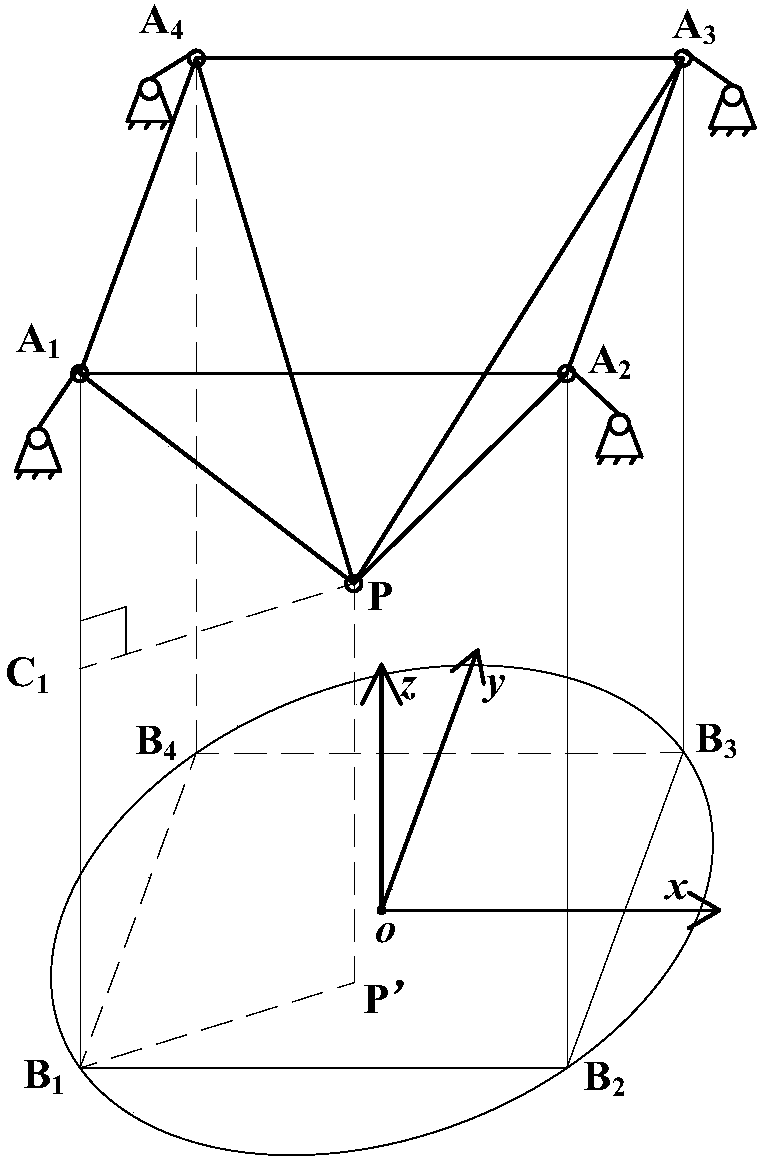
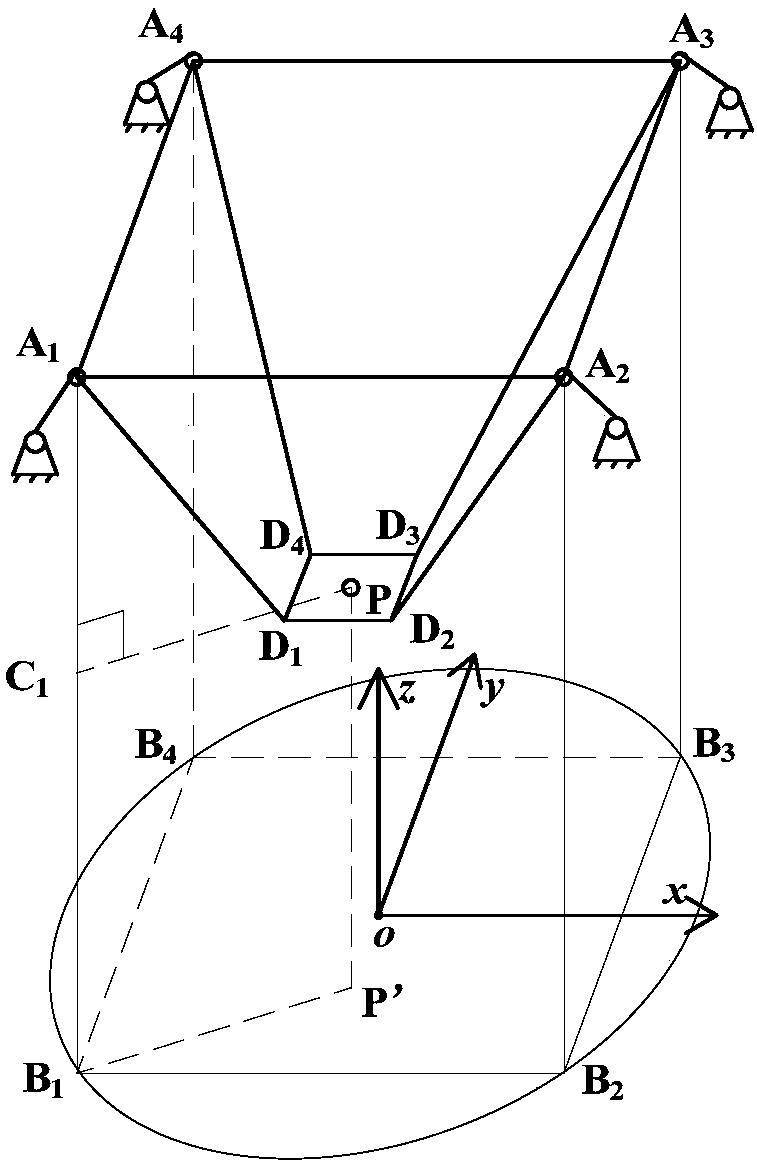
[0028] In summary, this embodiment uses a robot that includes a parallel mechanism to clean deep-sea net cages. The parallel mechanism is that the moving platform and the fixed platform are connected through at least two independent kinematic chains. The mechanism has two or more degrees of freedom, and It is driven in parallel; the cage body in the present invention belongs to the fixed platform part of the parallel mechanism, the four driving cables belong to the kinematic chain, and the terminal cleaning mechanism belongs to the moving platform. This embodiment is aimed at the most common HDPE deep-sea net cage at present, and adopts the method of parallel transmission of ropes. Connected to the end cleaning mechanism, the end cleaning mechanism achieves a force balance with the pulling force of the drive cable through its own gravity (acting as a virtual rope when the gravity is greater than the buoyancy), so that the end cleaning mechanism can realize three-dimensional und...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More