Instantaneous frequency estimation method based on LoG operator and PauTa test
An instantaneous frequency and operator technology, applied in the field of rotating machinery condition monitoring and fault diagnosis, can solve the problems of one-step cost function delay, low accuracy and precision, and cannot change with time, so as to eliminate time delay and avoid The effect of relying on and eliminating errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
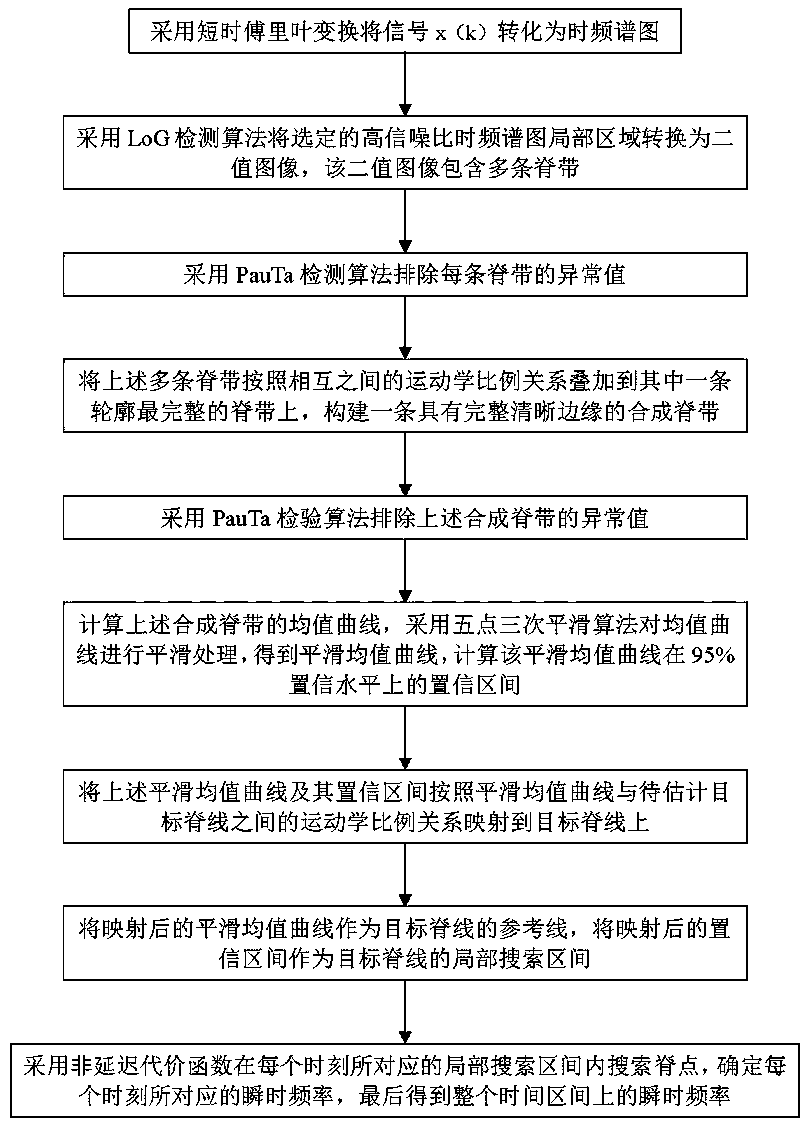
[0059] Examples such as figure 1 As shown, the instantaneous frequency estimation method based on LoG operator and PauTa test includes the following steps:
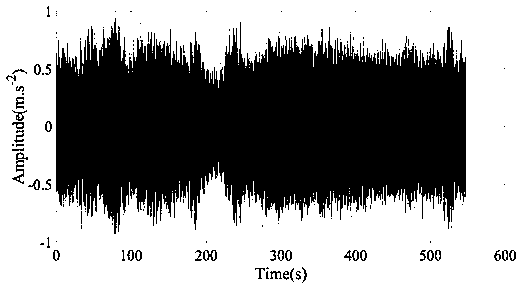
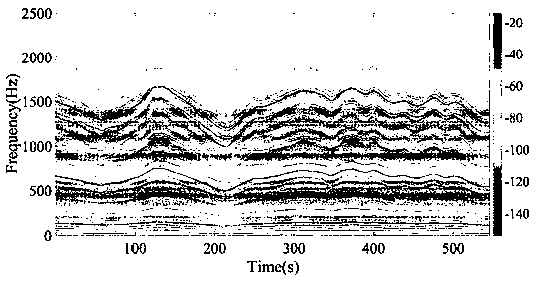
[0060] Step 1: Use the short-time Fourier transform algorithm to convert the signal x(k) (k=1, 2, ..., N) into a time-spectrogram, where N represents the length of the signal;
[0061] Step 2: Select a local area with a high signal-to-noise ratio from the time-spectrogram, and use the LoG detection algorithm to convert the local area into a binary image. The binary image contains multiple ridge bands; a local area refers to at least two Ridge bands, the area where the signal-to-noise ratio is greater than 80dB;
[0062] Step 3: Use the PauTa test algorithm to exclude outliers at the upper and lower edges of each ridge band;
[0063] Step 4: Superimpose the above-mentioned multiple ridges on one of the ridges with the most complete outline according to the kinematic proportional relationship between them to construct a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com