

Multi-classifier global dynamic fusion indoor positioning method
An indoor positioning and multi-classifier technology, which is applied to instruments, services based on location information, nan, etc., can solve the problems of not fully exploiting the intrinsic correlation characteristics of multi-classifiers, the decline of fusion performance, and the reduction of fusion accuracy, so as to improve matching Accuracy, robustness, and the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
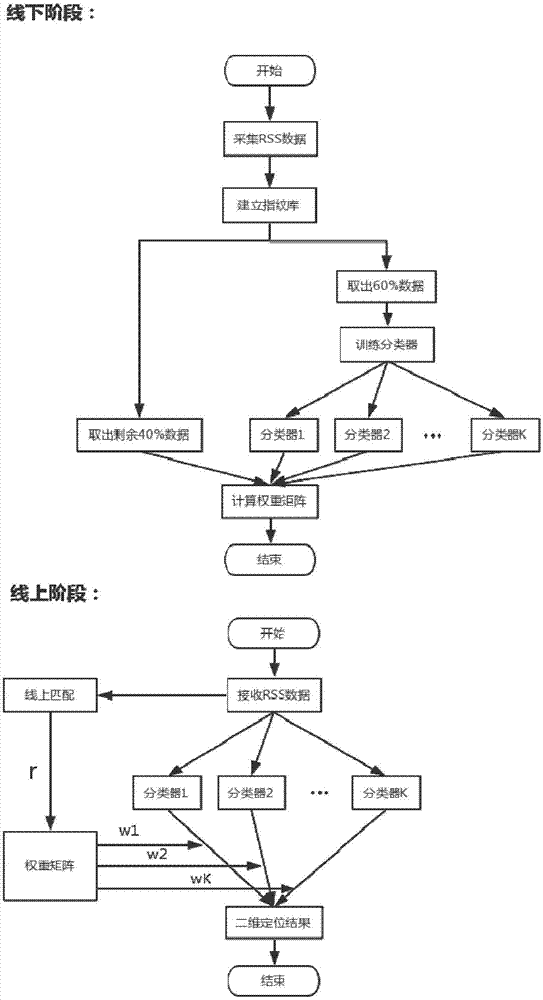
[0039] Step 1, establish an RSS fingerprint library for the divided grid point acquisition signal strength, as follows:
[0040] Step 1.1, experimental site layout:
[0041]The experimental environment is a classroom environment of 12.6m×10.8m, located in 411, Liren Building, University of Electronic Science and Technology of China. There are chairs, benches and cabinets in the room. Firstly, the site is divided into 95 grid points, each grid point is 0.6m×0.9m . Use 4 computers with Intel-5300 network cards installed as wireless routers, and their plane coordinates are [0,0] T ,[12,0] T ,[12,1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More