

Multi-robot synergistic system static stiffness real-time performance evaluation method
A multi-robot and robot technology, applied in the general control system, control/adjustment system, instrument, etc., to achieve the effect of improving processing accuracy, simple method steps, and good real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
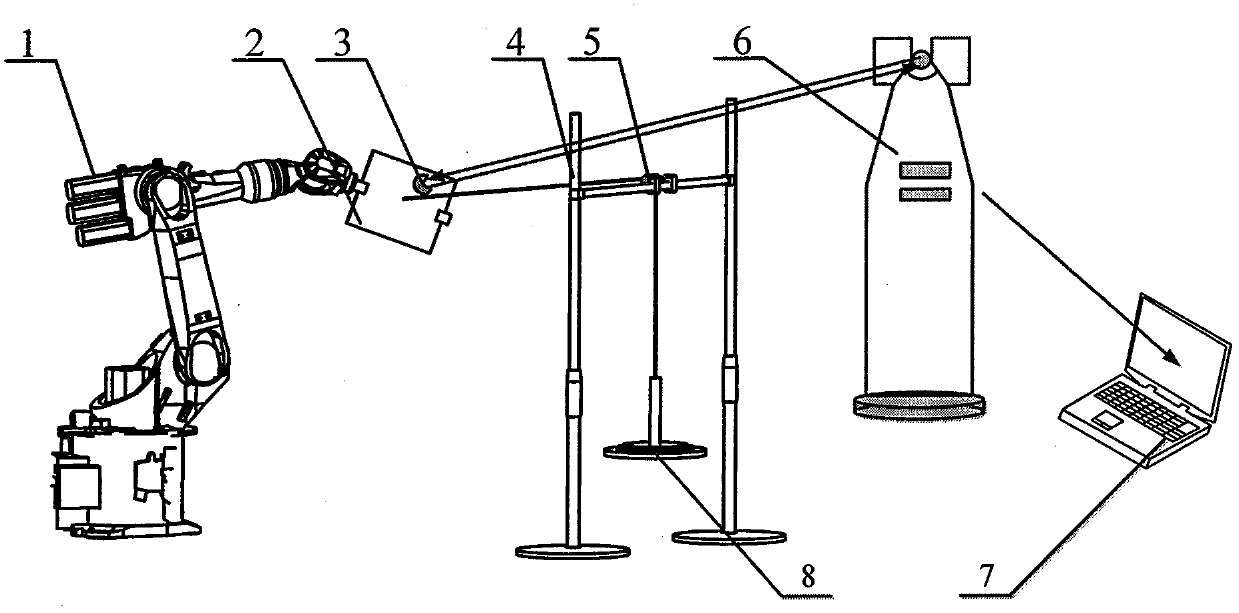
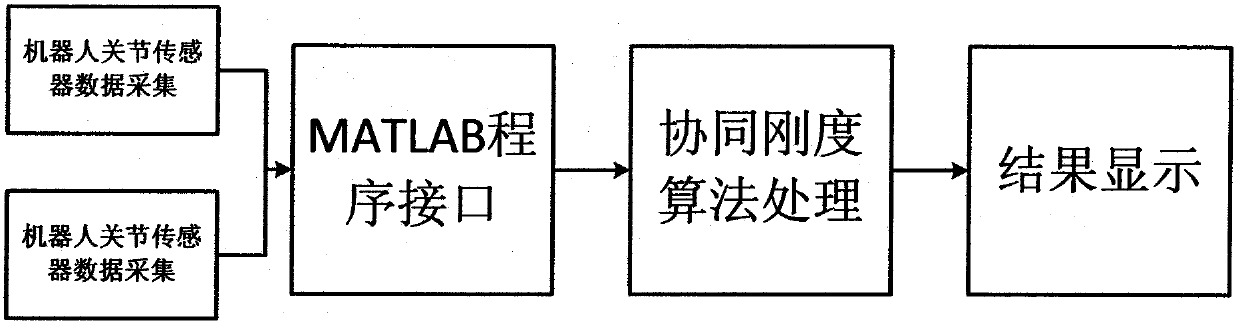
[0040] The following will be combined with Figure 1-4 And specific embodiment, the present invention is described in further detail:
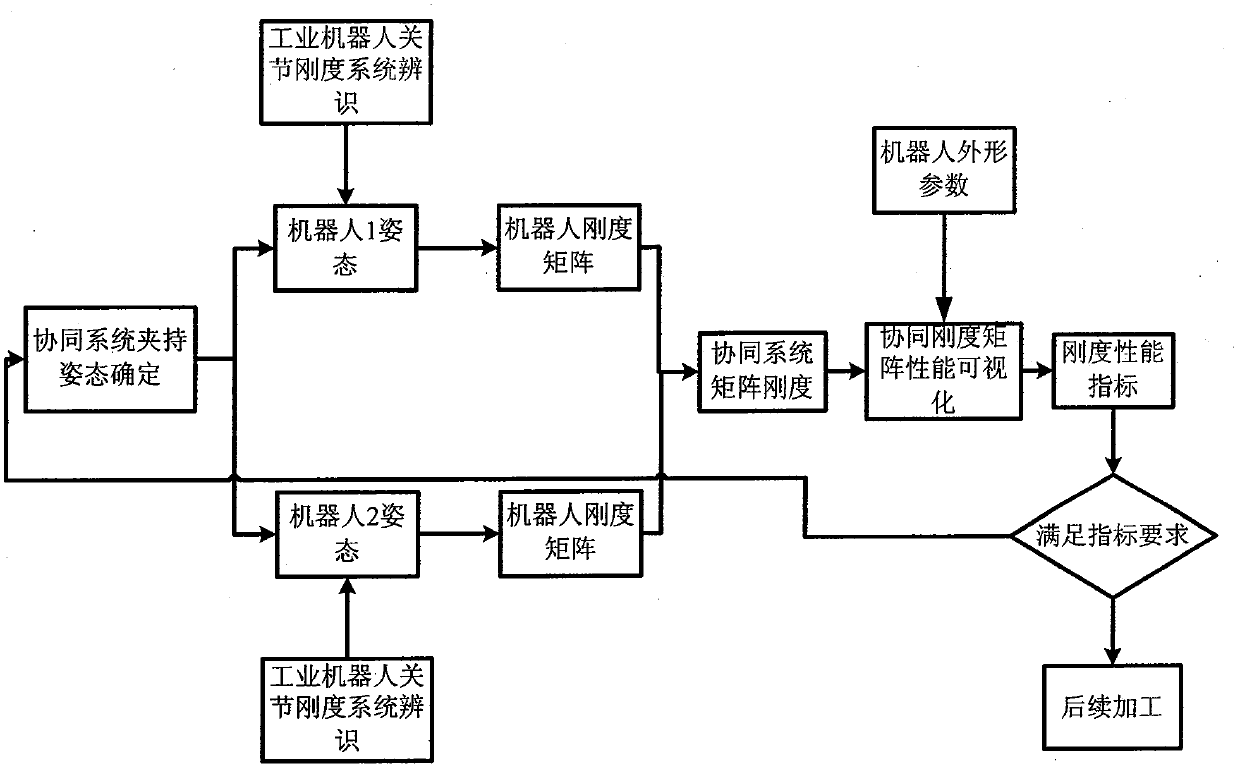
[0041] Such as figure 1 As shown, in the stiffness performance evaluation system of the multi-robot collaborative processing system proposed by the present invention, multiple robots jointly clamp the same workpiece, and the posture of the robot individual unit is selected by the multi-robot cooperative posture planner. The nominal joint stiffness value of the robot individual unit will deviate from the actual situation. The identification experiment is carried out for each robot joint stiffness value, and the actual robot joint stiffness value is obtained for subsequent system stiffness analysis. According to the joint angle assigned by the attitude planner to the robot individual unit, the operating stiffness matrix of the robot individual sub-unit is constructed. The accumulative relationship between the operating stiffness matrix of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More