

Non-contact type magnetic adsorption wall-climbing robot adaptive to complex wall surface operations
A wall-climbing robot, non-contact technology, applied to mechanical equipment, pipes/pipe joints/fittings, special pipes, etc., can solve problems such as single function, unreliable large-load adsorption force, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
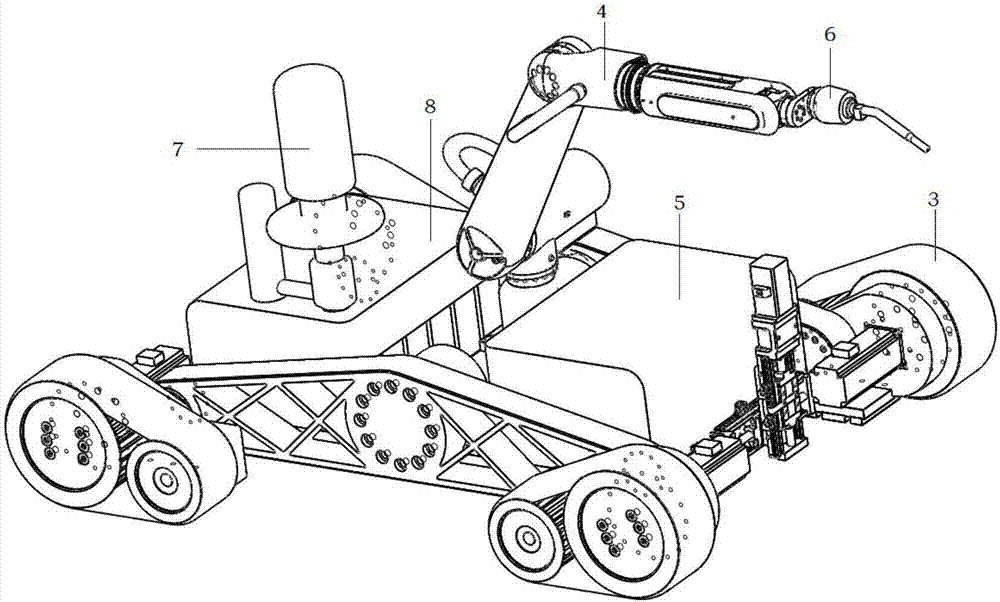
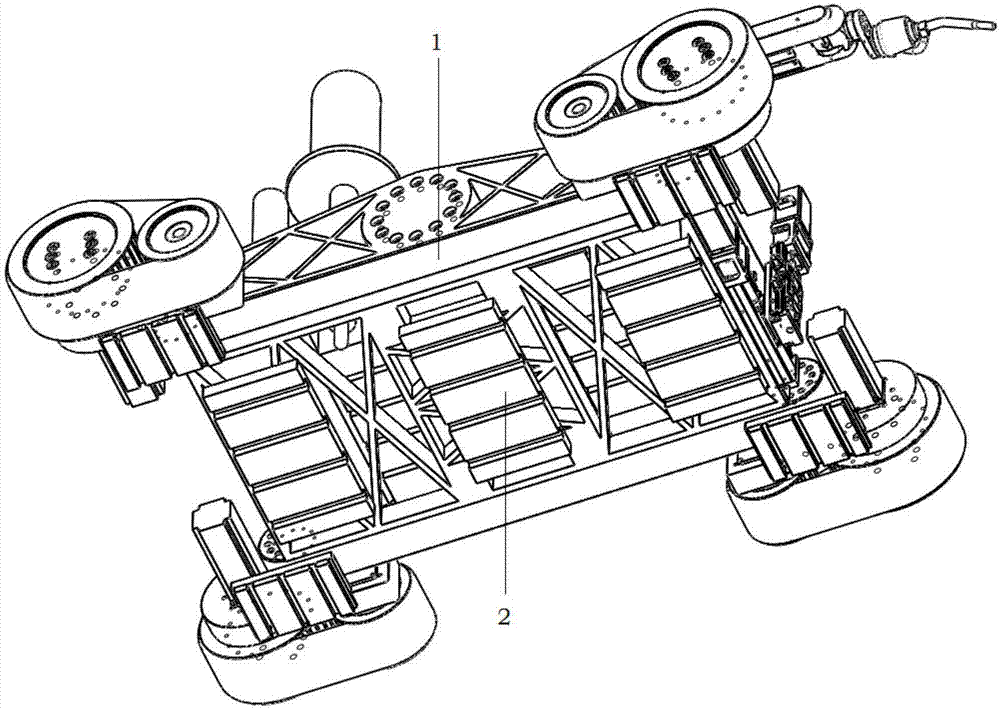
[0043] Such as Figure 1-Figure 2 As shown, a non-contact magnetic adsorption wall-climbing robot for adapting to complex wall operations, including: car body 1, adsorption device 2, mobile module 3, manipulator 4, non-destructive testing module 5, grinding and welding module 6, painting module 7, and control sensing module 8.
[0044] The vehicle body 1 includes a vehicle frame, and the vehicle frame serves as a carrier;
[0045] The adsorption device 2 is fixedly connected to the vehicle frame...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More