

Target autonomous recognition system and method for picking robot adapting to sudden changes in illumination
A picking robot and recognition method technology, applied in the field of picking robot target autonomous recognition system, can solve the problems of difficult targets, recognition and grasping, and achieve the effects of reducing the possibility, accurate recognition and positioning, and increasing the detection range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
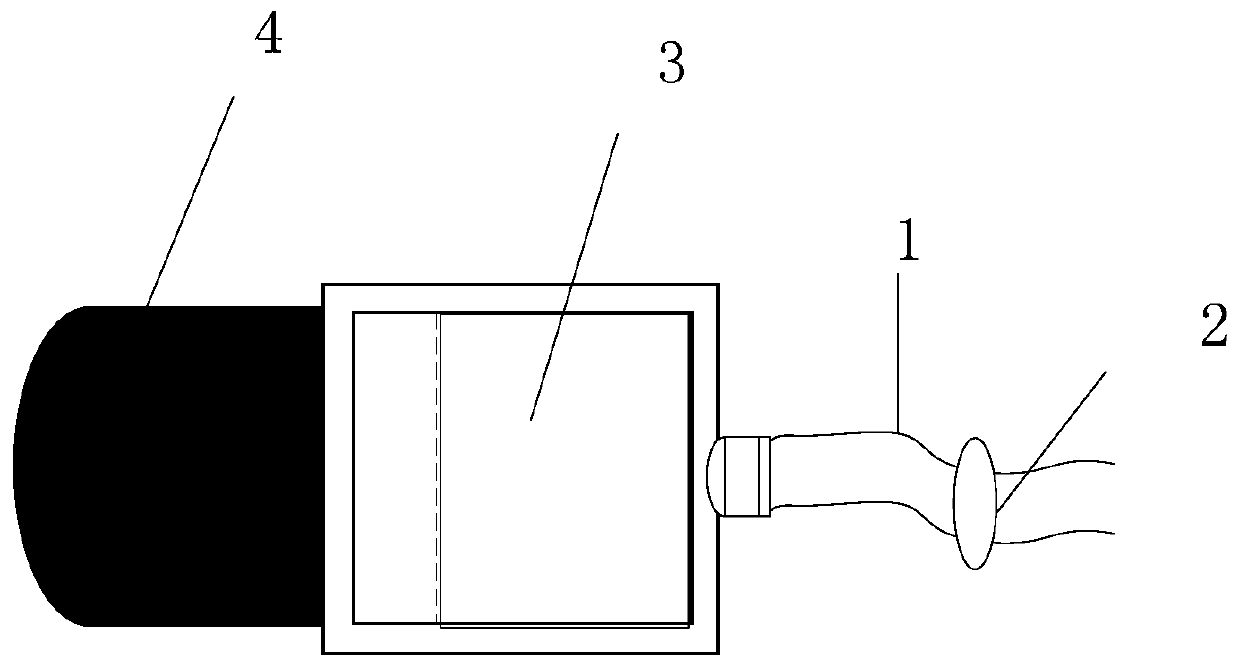
[0036] An autonomous target recognition system for a picking robot that adapts to sudden changes in light intensity, including a fruit and vegetable picking robot, on which a controller, a camera, and a light sensor are installed, and a telescopic shading device is installed on the upper end, left end, and right end of the camera, respectively. cover, such as image 3 As shown, the shading cover includes an air duct 1, a solenoid valve 2, an airtight chamber 3 and a shading sheet 4, the air inlet of the airtight chamber 3 communicates with the air duct 1, and the air duct 1 is connected to an external air source through the electromagnetic valve 2, The shading plate 4 is installed in the airtight chamber 3 through a piston and slides in the airtight chamber 3, and the solenoid valve is connected with the output end of the controller. The function of installing the hood is to increase the adjustable light range of the application scene.
[0037] LED lights are installed under ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More