

Hand rehabilitation training method based on Leap Motion controller
A rehabilitation training and controller technology, applied in gymnastics equipment, neural learning methods, instruments, etc., can solve the problems of hand rehabilitation of stroke patients without help, achieve the goals of improving training enthusiasm, ensuring the quality of rehabilitation training, and reducing rehabilitation costs Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0022] Embodiment 1: In this embodiment, static motion and dynamic motion are used to complete the evaluation of the patient's motion.
[0023] The hand rehabilitation training method of the present embodiment comprises the following steps:
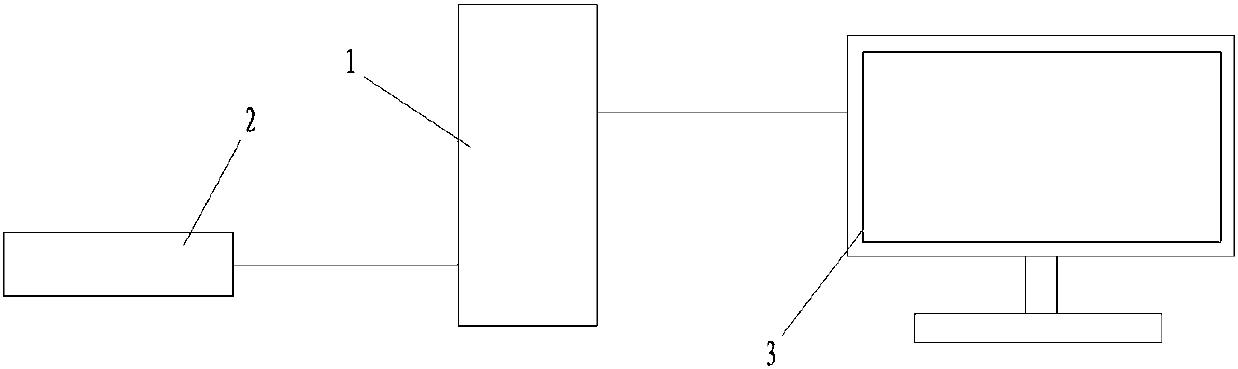
[0024] Step A, input standard hand movement data into the host computer 1 through the Leap Motion somatosensory controller 2 and the supporting Unity 3D software. In this step, the Leap Motion somatosensory controller 2 sends frame data to the host computer 1 at a rate of 60 frames per second, and each frame of frame data includes hand entity data and finger entity data. Standard feature data can be extracted from standard hand motion data.
[0025] Step B, the patient completes the rehabilitation training action according to the standard hand movement played by the display 3, and the Leap Motion somatosensory controller 2 acquires the data of the patient's hand movement in real time and transmits it to the computer host 1 during the pat...
Embodiment 2
[0041] Embodiment 2: Using the method of Embodiment 1, when the patient's training action slightly lags behind the standard action, a lower score may be given. In this embodiment, hand data processing based on machine learning is used to reduce the effect of training action lag and provide accurate evaluation results.
[0042] See attached Image 6 , the hand rehabilitation training method of the present embodiment comprises the following steps:
[0043] Step A, input standard hand movement data into the host computer 1 through the Leap Motion somatosensory controller 2 and the supporting Unity 3D software. In this step, the Leap Motion somatosensory controller 2 sends frame data to the host computer 1 at a rate of 60 frames per second, and each frame of frame data includes hand entity data and finger entity data. Standard feature data can be extracted from standard hand motion data.
[0044] Step B, the patient completes the rehabilitation training action according to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More