

Redundant drive active overconstrained three-degree-of-freedom parallel machine tool
An over-constraint, degree of freedom technology, applied to milling machines, milling machine equipment, milling machine equipment details, etc., can solve problems such as nonlinearity, strong coupling, large work space, and weak coupling, and achieve simple topology and large work space , the effect of weak coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
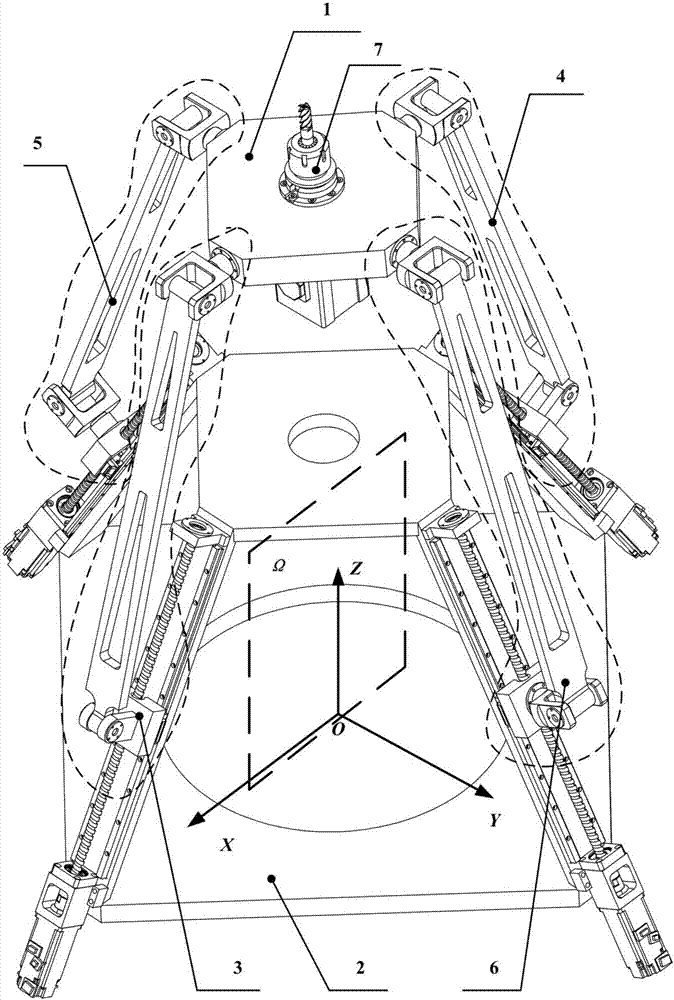
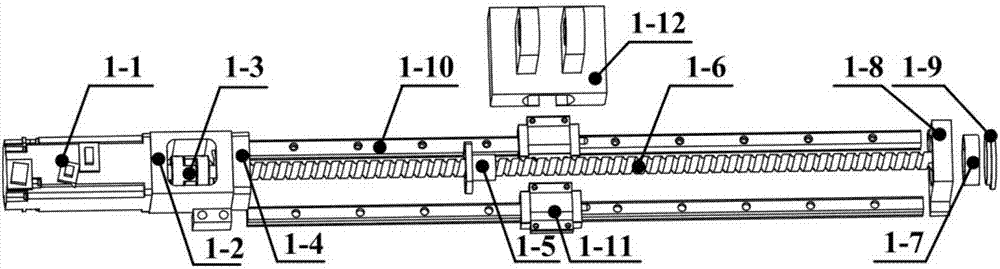
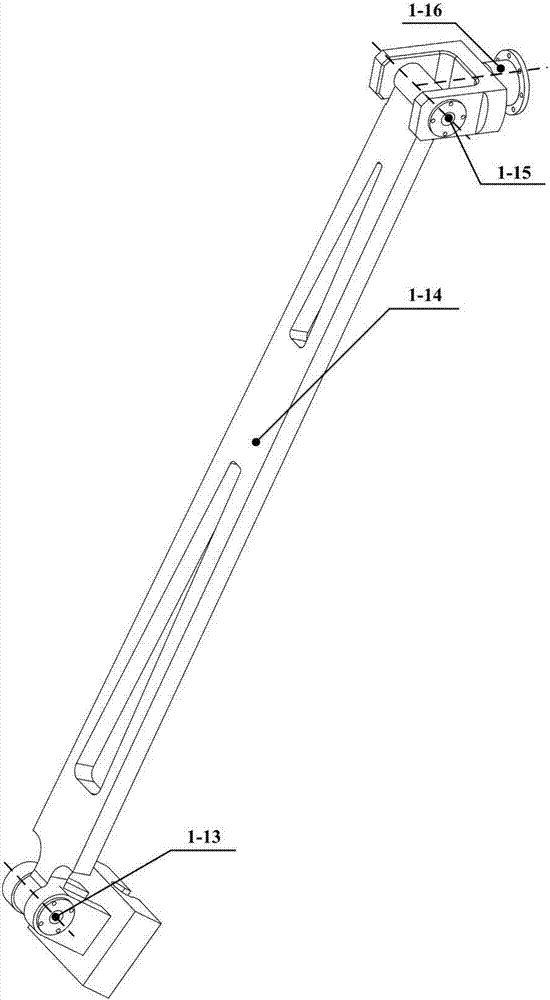
[0038] Such as figure 1 The schematic diagram of the overall structure of the redundantly driven active over-constrained three-degree-of-freedom parallel machine tool is shown, which includes the moving platform 1, the fixed platform 2, the first kinematic branch group 3, the second kinematic branch group 4, and the third kinematic branch group 5. The fourth movement branch chain group 6. The spindle head 7. Wherein the structure of the first motion branch chain group and the second motion branch chain group is exactly the same, and it is the main drive PRU branch, which includes a servo drive unit, a rotating subassembly, a branch chain body and a Hooke hinge, and the servo drive unit (such as figure 2 Shown) consists of servo motor 1-1, motor support 1-2, coupling 1-3, bearing 1-7, bearing support 1-4 (1-8), bearing end cover 1-9, ball wire Bar 1-6, nut pair 1-5, guide rail 1-10, slide block 1-11, the servo motor 1-1 is fixed on the motor support 1-2, and the motor support...
Embodiment 2
[0042] Such as Figure 5 The schematic diagram of the overall structure of the redundant drive active over-constrained three-degree-of-freedom parallel machine tool is shown in Fig. Chain group, third motion branch chain group, fourth motion branch chain group, spindle head. Among them, the first motion branch group and the second motion branch group have the same structure, are the main drive PRU branch, and their structure and composition are the same as those in Embodiment 1.
[0043] The difference from Embodiment 1 is that the third motion branch group and the fourth motion branch group are the main drive PUU (II) type branches, as shown in Figure 6, the first rotary shaft 2 of the Hooke hinge -1 is perpendicular to its second rotation axis 2-2, the first rotation axis 2-1 is in the same direction as the guide path of the servo drive unit, and the second rotation axis 2-2 is perpendicular to the first rotation axis 2-4 of another Hooke hinge Parallel, its second rotatio...
Embodiment 3
[0045] Such as Figure 7 As shown, the schematic diagram of the overall structure of the redundant drive active over-constrained three-degree-of-freedom parallel machine tool. The second movement branch chain group, the third movement branch chain group, the fourth movement branch chain group, and the spindle head. Wherein the first motion branch chain group and the second motion branch chain group have the same structure, are the main drive PRU branches, and their structure and composition are the same as those in Embodiment 1.
[0046] The difference from Embodiment 1 is that the third motion branch chain group is the main drive PUU (I) type branch, the first rotary axis of the Hooke hinge is perpendicular to its second rotary axis, and the second rotary axis is parallel to the coordinate axis Parallel, and the second rotation axis is parallel to the first rotation axis of another Hooke hinge, its second rotation axis is perpendicular to the first rotation axis, and the ext...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More