Line inspection method, device and unmanned aerial vehicle
A UAV, line technology, applied in three-dimensional position/channel control, attitude control and other directions, can solve the problem of limiting the field of view of inspection, and achieve the effect of good practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
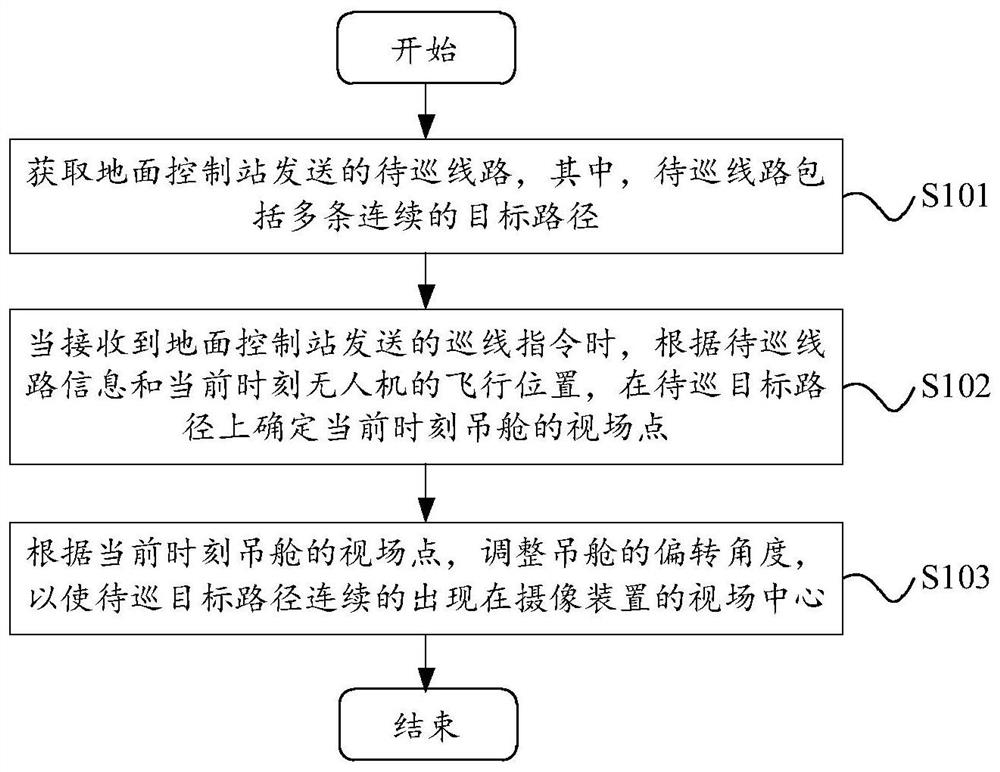
[0038] Please refer to image 3 , image 3 A flow chart of the line inspection method provided by the embodiment of the present invention is shown. The line inspection method includes the following steps:
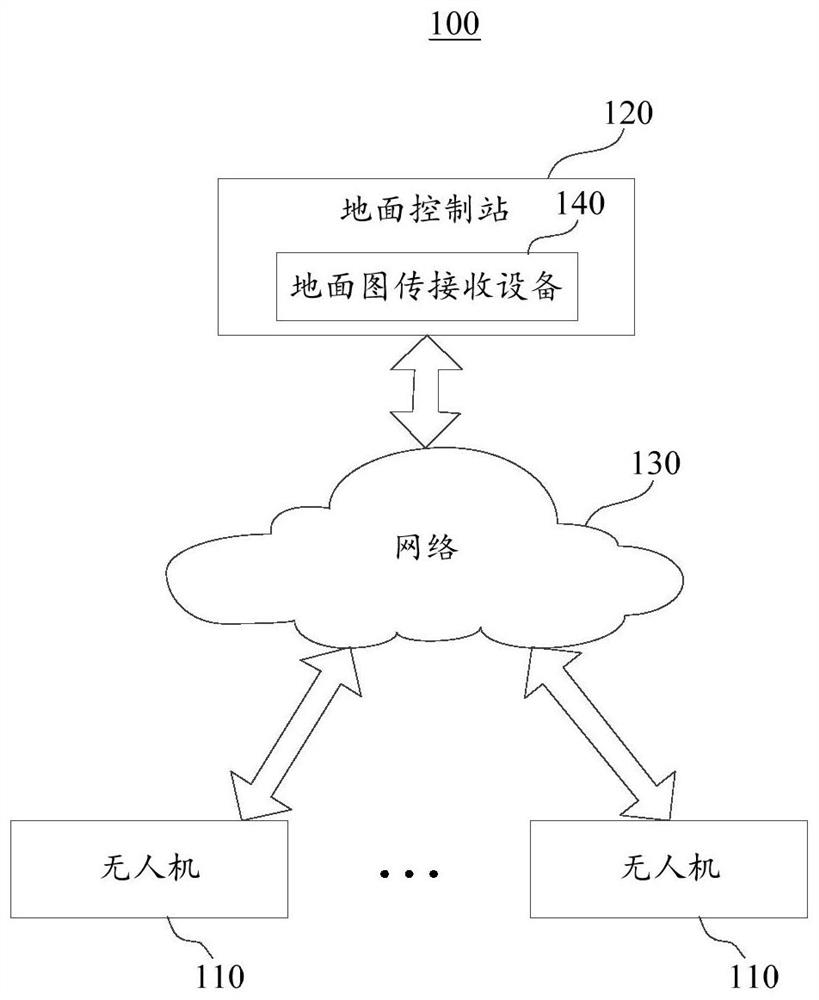
[0039] Step S101, acquiring the route to be inspected sent by the ground control station, wherein the route to be inspected includes a plurality of continuous target paths.
[0040] In the embodiment of the present invention, the line to be patrolled may be, but not limited to, power lines, roads, rivers and other lines. The route to be patrolled includes a plurality of continuous target paths, and each target path is composed of several route points, and each route point includes serial number, latitude, longitude and height information.
[0041] As an implementation manner, the information of all route points constituting the route to be patrolled can be written in text in advance, and the ground control station 120 can obtain the information of the route to be patroll...
no. 2 example
[0099] Please refer to Figure 10 , Figure 10 A schematic block diagram of the line inspection device 200 provided by the embodiment of the present invention is shown. The line patrol inspection device 200 includes a line to be patrolled acquisition module 210 , a field of view point determination module 220 and a pod adjustment module 230 .
[0100] The route to be inspected acquisition module 210 is configured to obtain the route to be inspected sent by the ground control station, wherein the route to be inspected includes a plurality of continuous target paths.
[0101] In the embodiment of the present invention, the line to be inspected acquiring module 210 may be used to execute step S101.
[0102] The field of view point determination module 220 is used to determine the view point of the pod at the current moment on the target path to be patrolled according to the line information to be patrolled and the flight position of the drone at the current moment when receivin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More