

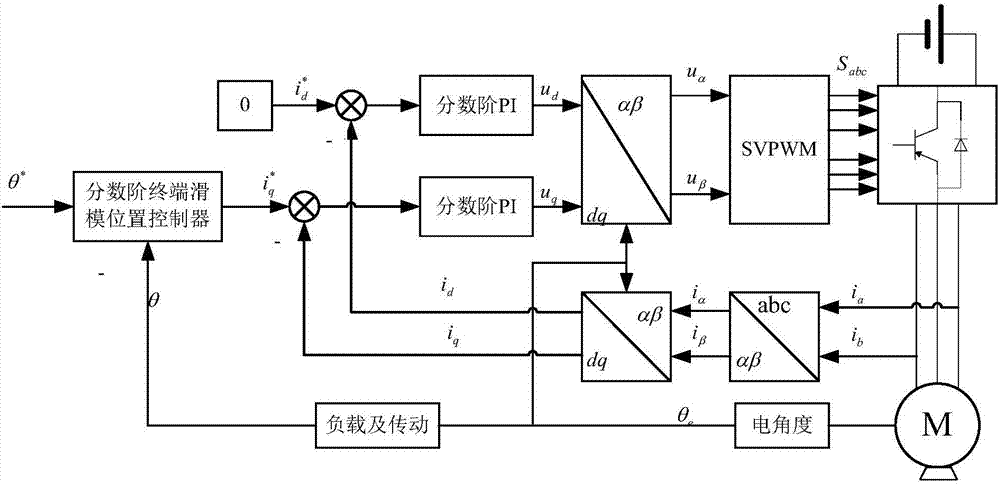
Follow-up control method by means of fractional-order quick terminal sliding mode control
A terminal sliding mode, fractional-order technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve problems such as less-than-expected follow-up performance and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0071] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
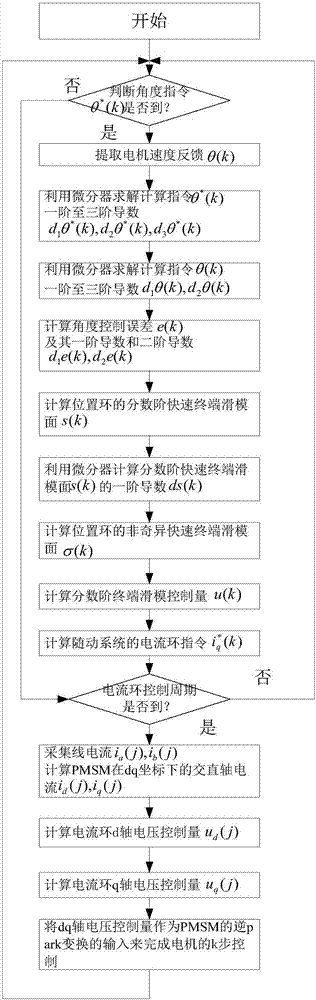
[0072] Scheme of the present invention has following steps:
[0073] (1) Judgment angle command θ * (k) Is it there? Yes, enter step (2), otherwise just enter step (11), k is the step number of angle control;
[0074] (2) Extract the follow-up angle feedback θ(k), T sp is the follow-up angle control period;
[0075] (3) Use the differentiator to solve the calculation instruction θ * (k) First to third derivative d 1 θ * (k),d 2 θ * (k),d 3 θ * (k):
[0076]
[0077]
[0078]
[0079]
[0080]
[0081]
[0082] in, is the sliding surface θ * (k-1) estimation error; are θ * (k) and its first-order, second-order, and third-order estimated values; are the first-order, second-order, third-order, and fourth-order gains of the differential esti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More