Wire mesh combined machine back antenna hook collision line type ground surface and shipboard recovery system and method for small-sized unmanned aerial vehicle
A small drone and recovery system technology, applied in the field of recovery of small fixed-wing drones, can solve problems such as damage to drones, inability to recover at precise points, and inapplicability to high-span UAVs, so as to avoid being affected damage, avoid the entanglement of the propeller and the blocking net, and require low wing strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
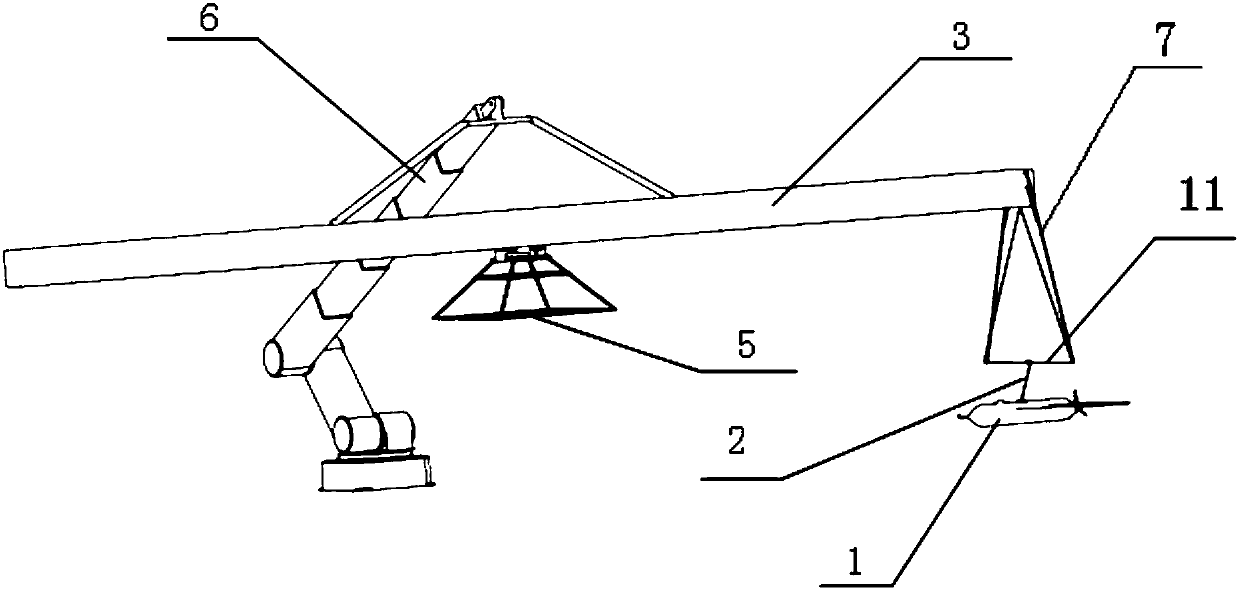
[0021] Specific implementation mode one: refer to figure 1 and figure 2 Describe this embodiment in detail, a kind of ground and shipboard small unmanned aerial vehicle recovery system described in this embodiment, which includes a foldable sky hook 2, a recovery slideway and a buffer device 3 , arresting rope 11, capture net 5, recovery support 6, arresting rope support arm 7 and guiding device,
[0022] The recovery bracket 6 is used to drive the recovery slideway and the buffer device 3 to move,
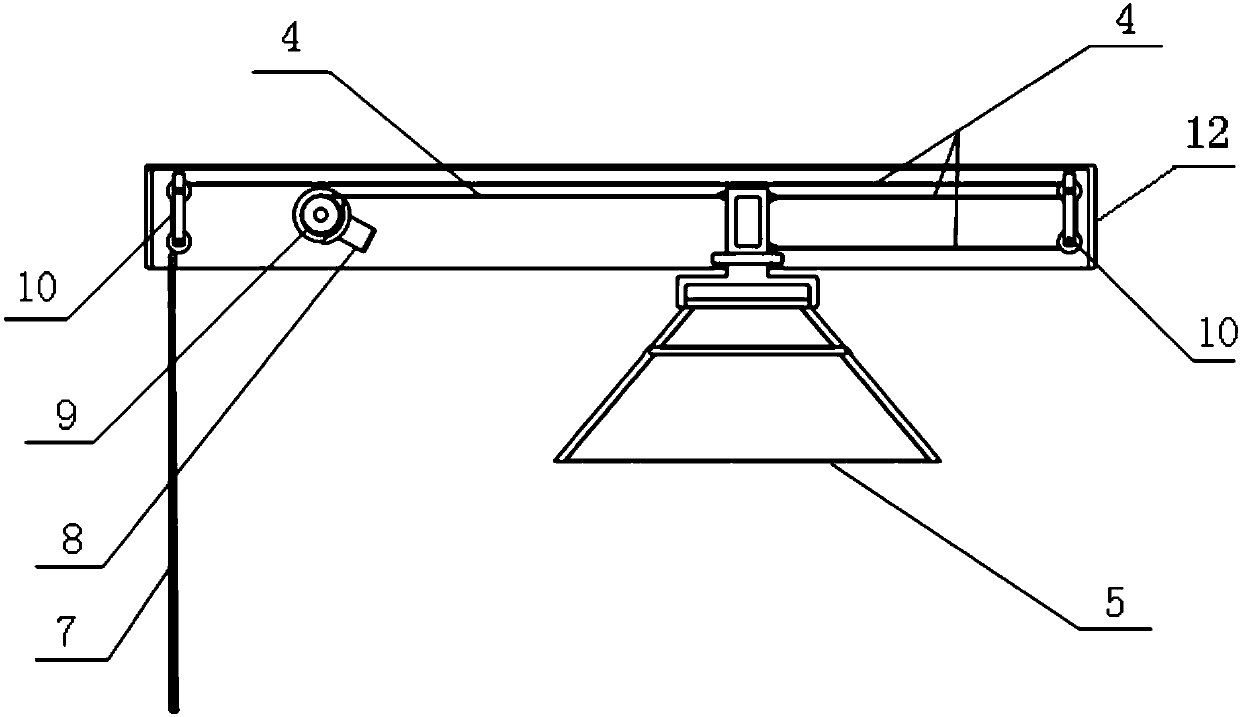
[0023] Recovery slideway and buffer device 3 comprise traction rope 4, brake 8, reel 9 with brake pad, two groups of fixed pulleys 10 and housing 12, traction rope 4, brake 8, reel 9 with brake pad and Two sets of fixed pulleys 10 are all arranged in the housing 12,
[0024] The free end of traction rope 4 drags one end of catch net 5 through two groups of fixed pulleys 10 and slides toward the direction of UAV 1, and the reel 9 with brake pad is connected with the other end o...
specific Embodiment approach 2
[0034] Specific embodiment 2: This embodiment is a further description of the ground and ship-borne small unmanned aerial vehicle recovery system described in the specific embodiment 1 of a kind of wire-net composite machine back skyhook collision line type. In this embodiment, the foldable The skyhook 2 is provided with a quick locking device, and the quick locking device is used to complete locking with the arresting rope 11 to avoid decoupling after capture.
specific Embodiment approach 3
[0035] Specific embodiment 3: This embodiment is a method for recovering a wire-mesh compound machine with a skyhook hitting the line on the ground and a ship-borne small unmanned aerial vehicle. The skyhook collision line type ground and shipborne small unmanned aerial vehicle recovery system is realized, and described method comprises the following steps:
[0036] Step 1. When the UAV 1 approaches the arresting rope 11 according to the guiding device at its end, the foldable skyhook 2 pops up according to the control instruction, and is hooked on the arresting rope 11;
[0037] Step 2: The mounted UAV 1 will pull the arresting rope 11 to continue moving. At this time, the free end of the traction rope 4 drags the capture net 5 to the direction of the UAV 1 through two sets of fixed pulleys 10 until the UAV 1 bumps into the capture net 5, and the UAV 1 is hooked on the capture net 5 by the nose barb on it, so as to realize the recovery of the UAV 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com