Robot parking garage truck space arranging and path planning for dense storage
A path planning, parking garage technology, applied in data processing applications, buildings where cars are parked, forecasting, etc. problems, to achieve the effect of increasing the number of parking spaces, reducing the space occupied by the passage, and improving the operating efficiency of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
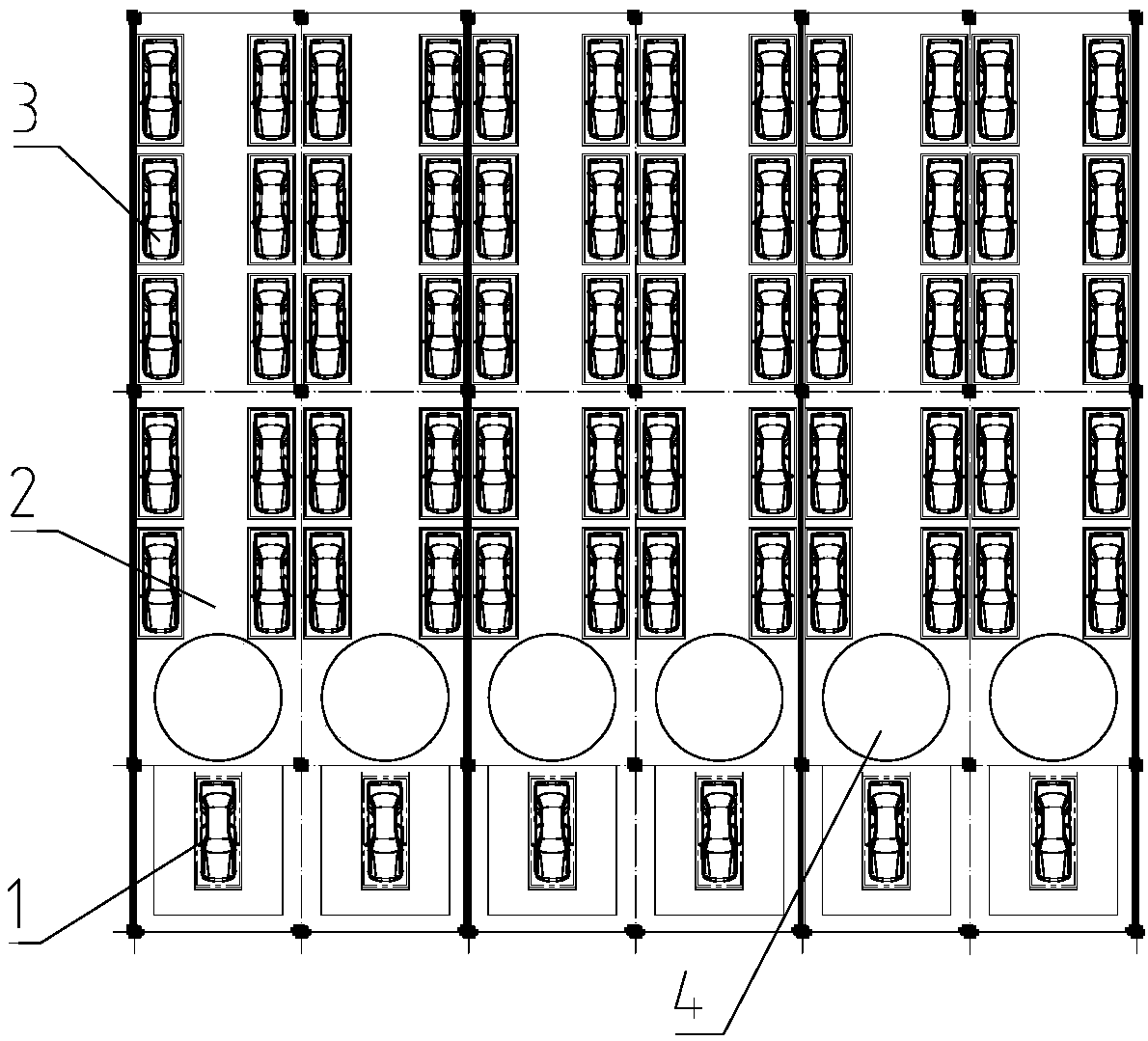
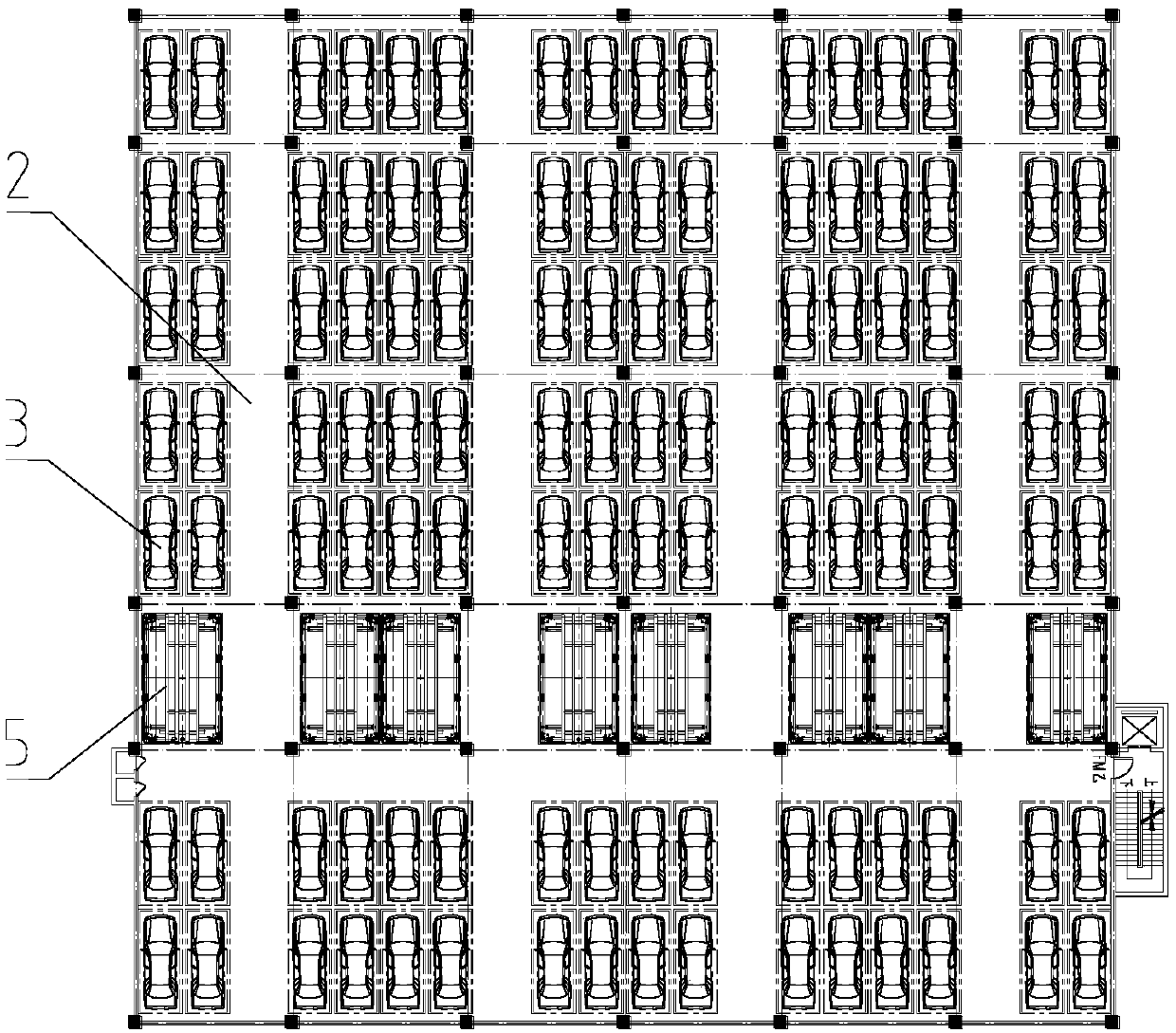
[0022] Embodiment 1: A parking space arrangement for a robot parking garage for intensive storage, such as figure 1 and figure 2 Description: The spatial distribution of the parking space in the parking area of the robot parking garage includes the vehicle access and exchange entrance 1, the parking space 2 and the main vehicle passage 3. Lifting device 5.
[0023] Among them, the vehicle main passage 2 is a one-way street, with a main vehicle main passage as a vehicle storage unit. The parking spaces are located on both sides of the vehicle main passage and parallel to the vehicle main passage. The parking spaces can be arranged in a single row, such as figure 1 Or in a double row manner such as figure 2 , the lifting device 5 is located on both sides of the main channel 2 of the vehicle, and the AGV enters the main channel from the side of the lifting device 5 .
Embodiment 2
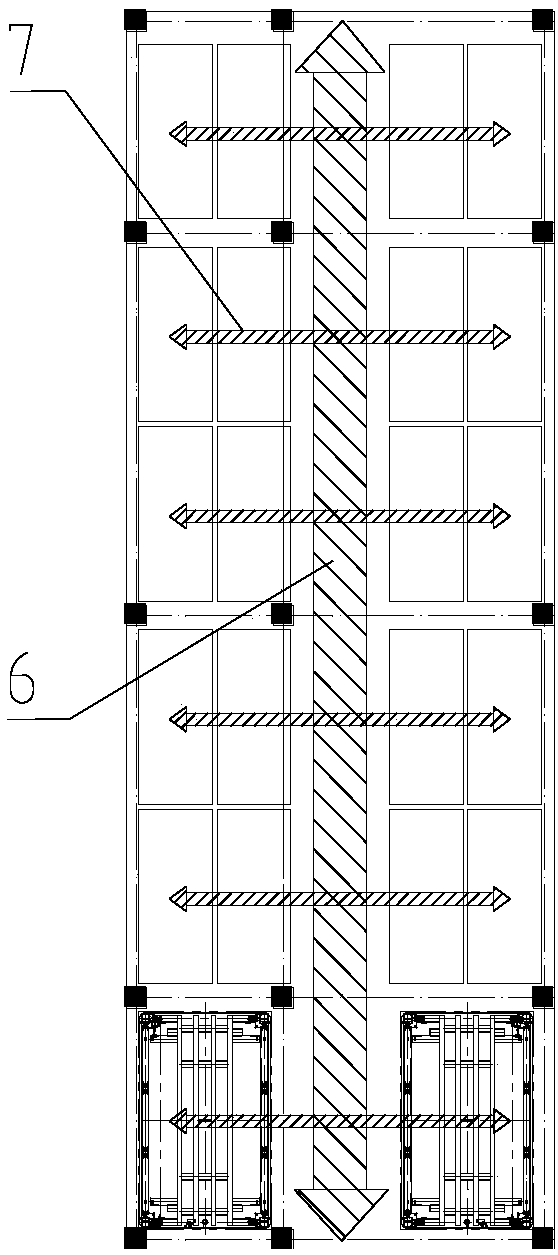
[0024] Embodiment 2: a kind of robot parking garage path planning for intensive storage, such as image 3 , Figure 4 , Figure 5 Described, image 3 As shown in the AGV vehicle-loading access running path, when the AGV is loaded with vehicles for accessing operations, the running path is to use the main channel of the vehicle as the vehicle-carrying arterial road 6, and the path connecting each parking space on both sides is the vehicle-carrying branch road 7-side, The AGV drives longitudinally along the main road on the main channel of the vehicle, and turns to drive laterally along the branch road when it reaches the parking space planned by the system; Figure 4 As shown in the no-load running path of the AGV, when the AGV is in the no-load running state, the running path is the space below the parking space as the no-load arterial road 8, and the path connecting each parking space and the main channel of the vehicle is the no-load branch road 9, and the AGV On the main...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com