

Self-adaptive automobile instrument detection method based on character segmentation cascaded quadratic classifier
A two-classifier and character segmentation technology, applied in the field of visual detection of automotive instrument pointers, to achieve the effect of wide application, strong adaptability and high robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
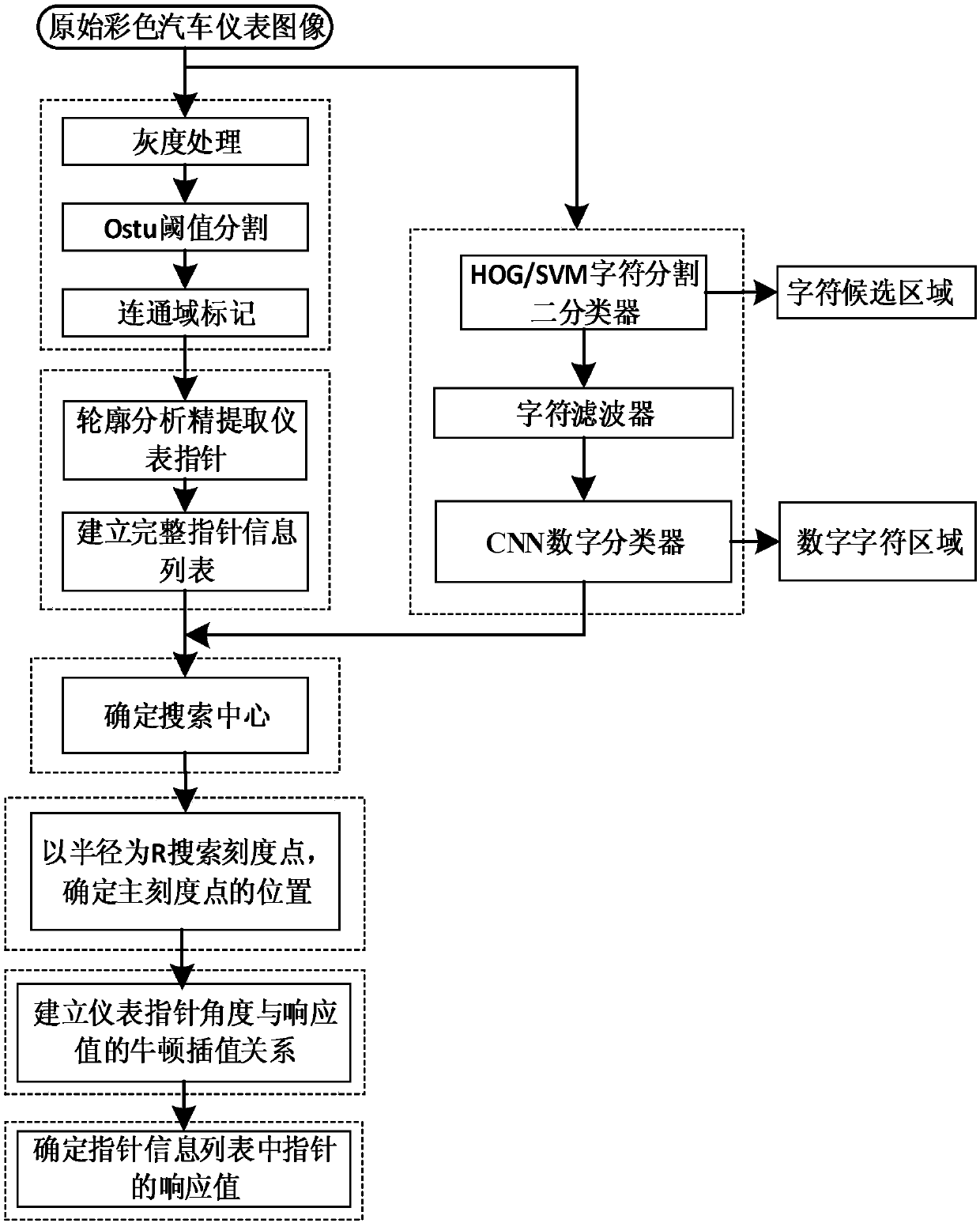
[0041] Specific implementation mode one: refer to figure 1 and Figure 4 Describe this embodiment in detail, a kind of adaptive automobile meter detection method based on character segmentation cascade binary classifier described in this embodiment, comprises the following steps:
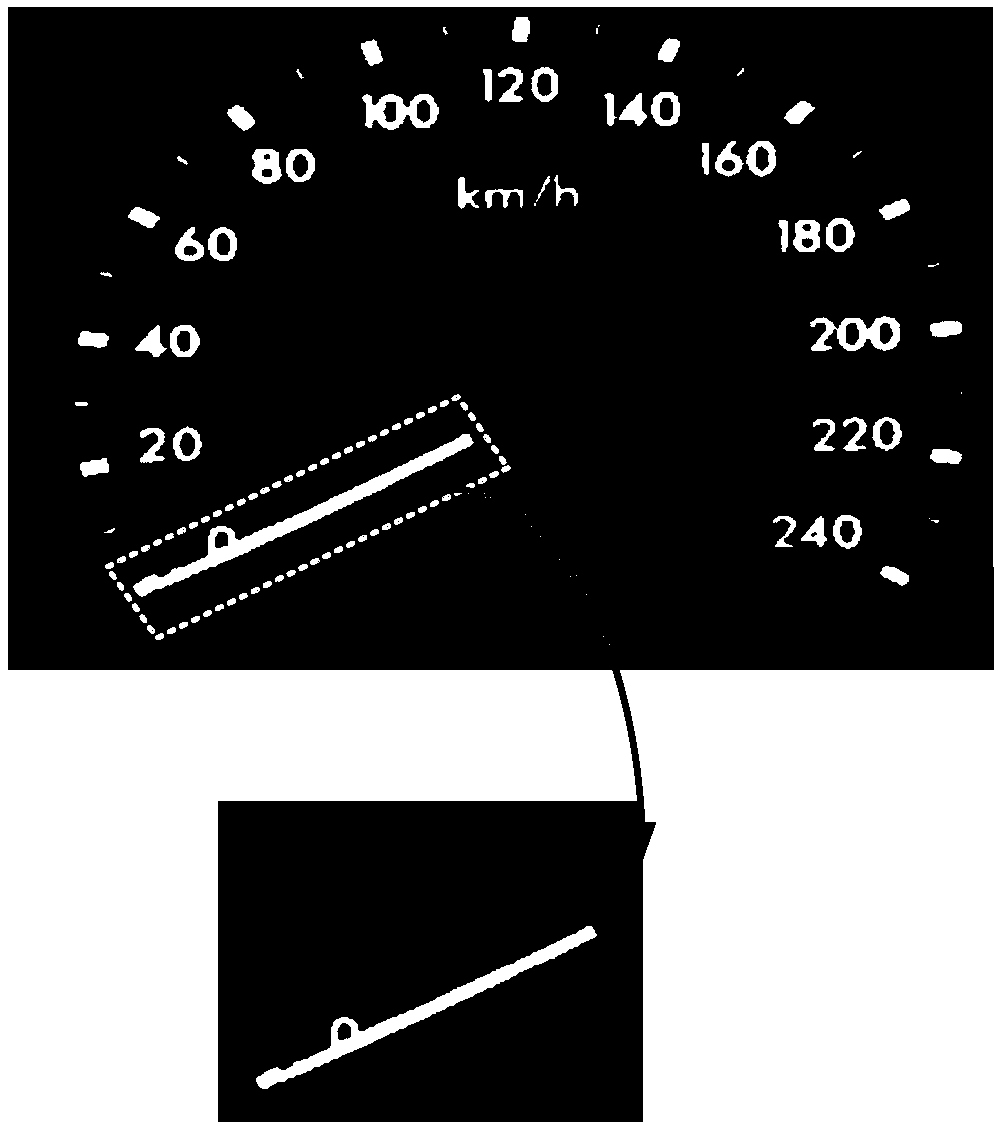
[0042] Step 1: When the input signal value of the instrument under test is i, the instrument pointer responds to the signal, rotates to obtain the response value, collects the color image of the entire car dial as the original image, and obtains the instrument under test (speedometer or tachometer) in the original image ) of the ROI (Region of Interest, region of interest) image, the ROI image is grayscaled and the Ostu algorithm is used for threshold segmentation to obtain a binary image, and each connected domain of the binary image is binarized and marked, and then Execute step two;
[0043] Step 2: Use the method based on contour analysis to perform fine extraction of instrument pointers on t...
specific Embodiment approach 2
[0057] Specific implementation mode two: refer to figure 2 and 3 This embodiment is described in detail. This embodiment is a further description of the adaptive automobile instrument detection method based on character segmentation cascaded binary classifiers described in the first embodiment. In this embodiment, the instrument pointer in step two is connected. The specific method of obtaining the domain image is as follows:
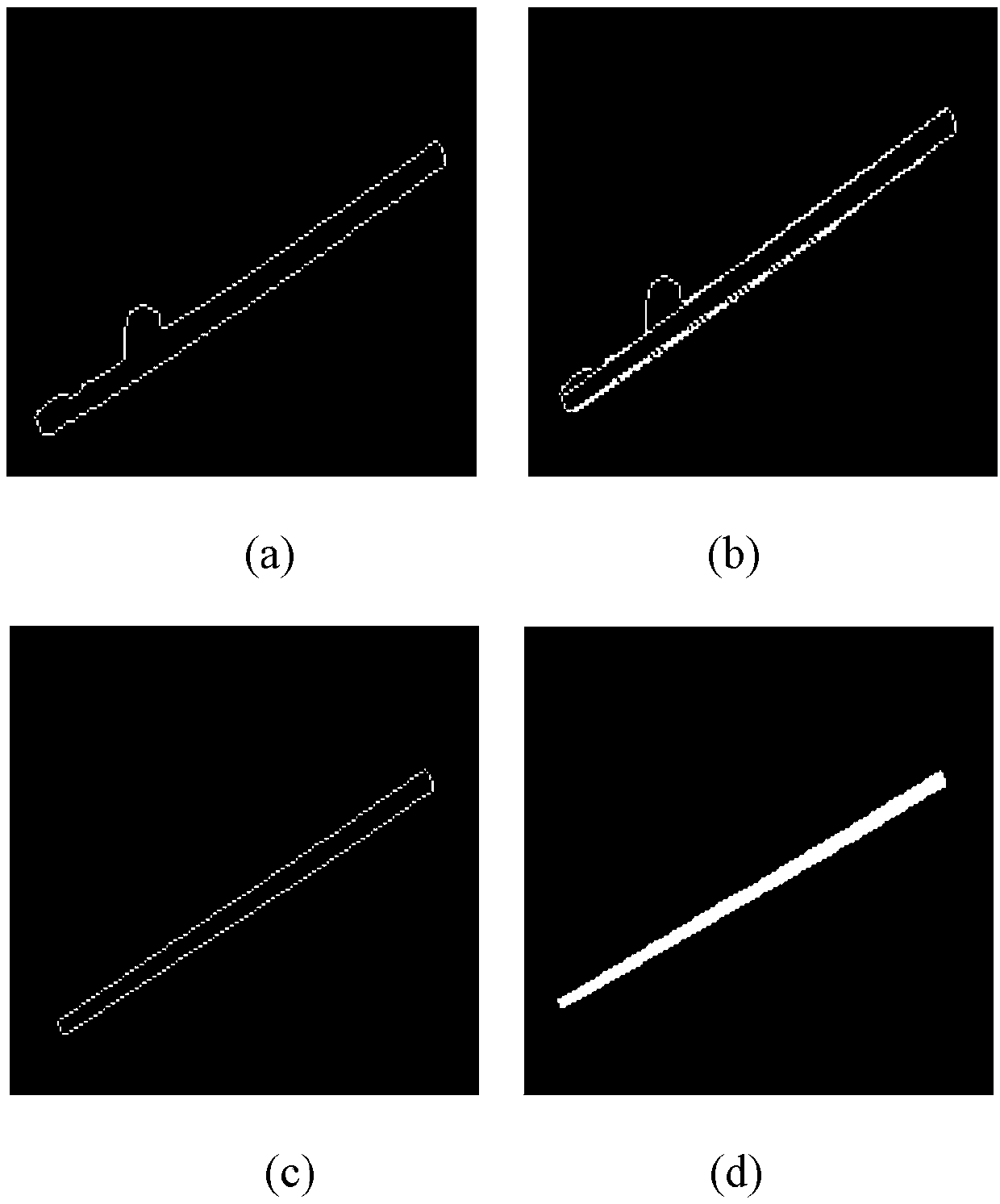
[0058] Rough pointer extraction is performed on the connected domain with the largest area after binarization marking, and the rough pointer extraction image is obtained.
[0059] Extract the contour of the pointer and roughly extract the image to obtain the contour image,
[0060] The PPHT (Progressive Probabilistic Hough Transform) algorithm is used to fit the contour image to obtain a contour image with a contour fitting line.
[0061] Find the inner contour with the largest area in the contour image with the contour fitting straight line, and ext...
specific Embodiment approach 3
[0062] Specific implementation mode three: refer to Figure 4 This embodiment is described in detail. This embodiment is a further description of a kind of adaptive automobile meter detection method based on character segmentation cascaded two classifiers described in the first embodiment. In this embodiment, in step 4, use the following The formula obtains the intersection point (x k ,y k ):
[0063] (The slope of the two fitting lines k 1 and k 2 both exist)
[0064] (One of the fitted straight lines slope k 2 does not exist)
[0065] Among them, b 1 and b 2 are the intercepts of the two fitted straight lines, k 1 and k 2 are the slopes of the two fitted straight lines, respectively;
[0066]Take the average value of the intersection points of N fitted straight lines as the rotation center of the instrument pointer (x center ,y center ), using the following formula to obtain the center of rotation of the instrument pointer (x center ,y center ),
[0067] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More