

Indoor mobile robot vision SLAM method based on Kinect
A mobile robot and vision technology, applied in instruments, image data processing, computing, etc., can solve problems such as local optimum and large matching error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0042] The technical scheme that the present invention solves the problems of the technologies described above is:
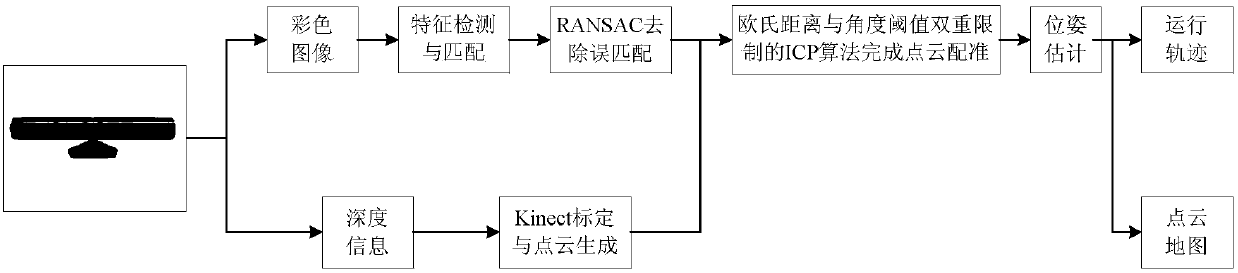
[0043]The invention provides a kind of Kinect-based indoor mobile robot visual SLAM method, it is characterized in that, comprises the following steps:
[0044] S1, use the Kinect camera to collect the color RGB data and depth data of the indoor environment.
[0045] S2, use the SURF feature with rotation and scale invariance for RGB data to detect image key points, use the image "pyramid" to construct the scale space, then locate the key points, determine the main direction of each key point, and generate a feature description For example, the FLANN algorithm is used to achieve fast and e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More