

Physic object tracking and positioning method based on nature characteristics
A physical object, tracking and positioning technology, applied in image data processing, instruments, calculations, etc., can solve problems such as poor practicability, achieve good practicability, ensure accuracy and stability, and ensure automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
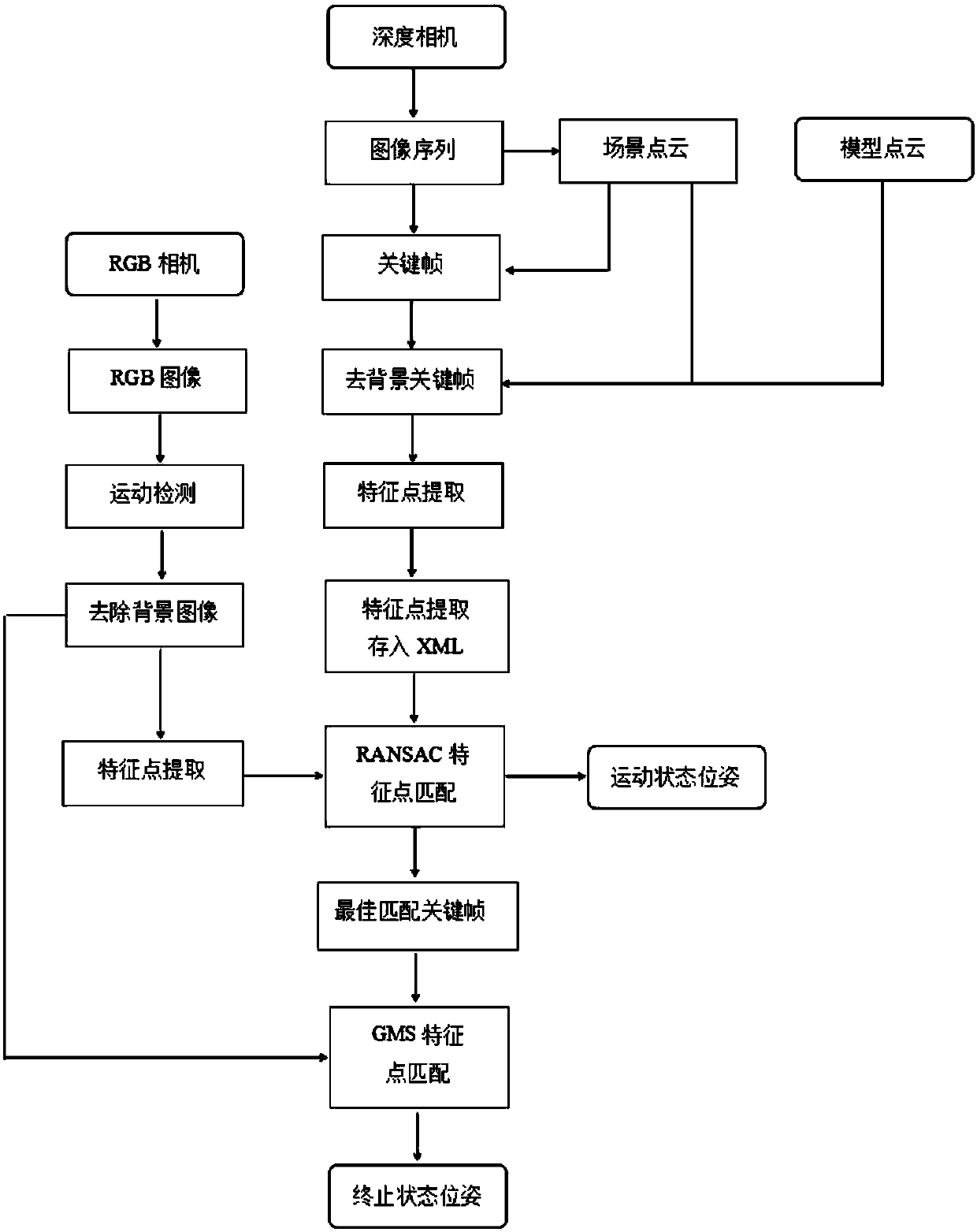
[0043] refer to Figure 1-5 . The specific steps of the physical object tracking and positioning method based on natural features of the present invention are as follows:
[0044] Step 1: 3D modeling of physical objects. Divided into the following 5 steps:
[0045] Step 1.1: Use the depth camera / binocular camera to collect multi-angle images of the physical object to obtain an image sequence of the physical object. Use the depth map or disparity map to obtain the local point cloud p corresponding to the image i .
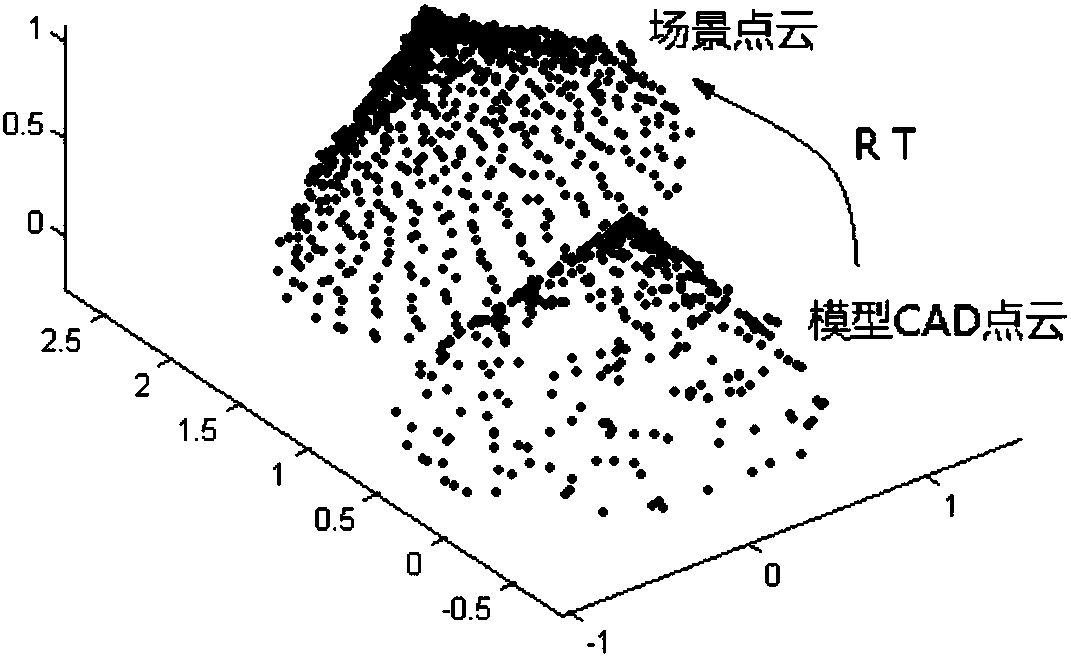
[0046] Step 1.2: Use the iterative closest point algorithm to stitch and fuse the local 3D point cloud scene, complete the 3D reconstruction, and obtain the complete 3D point cloud scene including physical objects, and the translation matrix T of the image sequence relative to the reference coordinate system j and the rotation matrix R j . Calculate the Euler angles α, β, γ from the rotation matrix R, with the best angle interval, the present invention is ver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More