

Feedforward closed loop composite control method and system of piezoelectric ceramic driver
A piezoelectric ceramic and composite control technology, which is applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as asymmetrical hysteresis curves of piezoelectric ceramics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
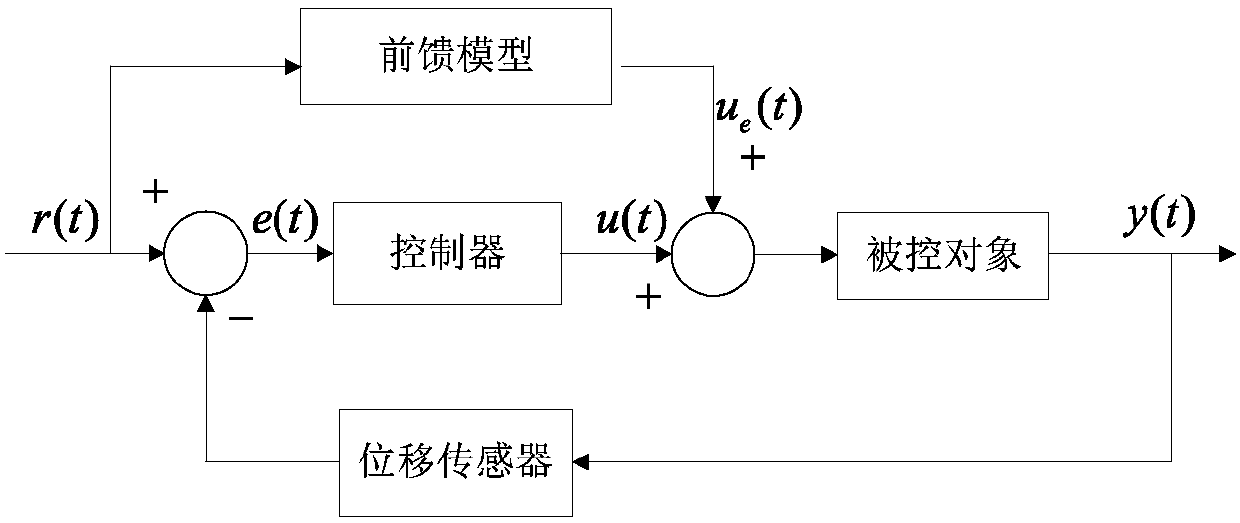
[0104] The feedforward and closed-loop composite control method of the piezoelectric ceramic driver in this embodiment includes: inputting the expected displacement r(t) of the piezoelectric ceramic driver into the feedforward model, and the feedforward model is calculated according to the expected displacement value r(t) Get the initial driving voltage u of the piezoceramic driver ε (t); With the piezoelectric ceramic displacement or the piezoelectric ceramic driver displacement as the feedback signal of the PID controller, the initial drive voltage u is controlled by the PID controller ε (t) Eliminate the error to obtain the driving voltage of the piezoelectric ceramic driver, and use the BP neural network to adjust the proportional parameter k of the PID controller p , integral adjustment parameter k i , the differential adjustment parameter k d optimize.
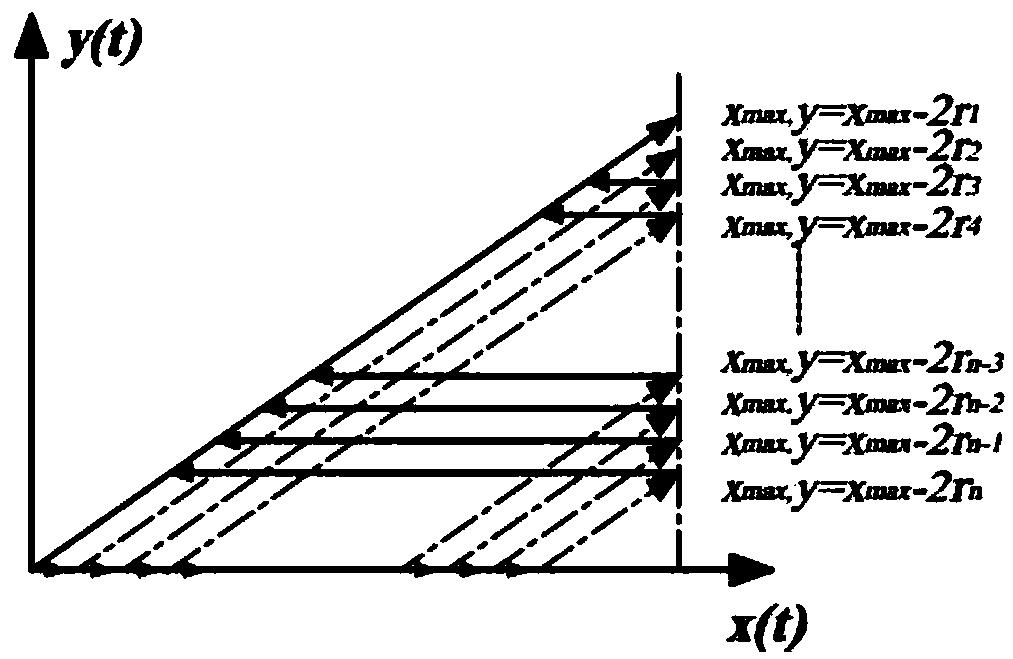
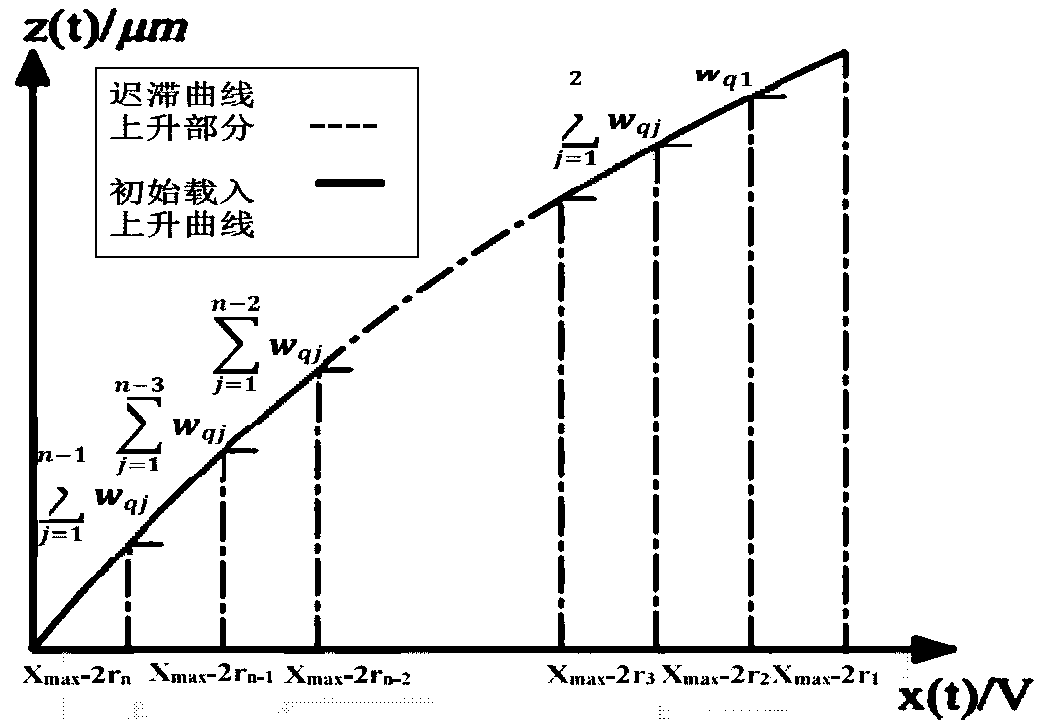
[0105] In the present embodiment, described feed-forward model is improved PI hysteresis inverse model, and describ...
Embodiment 2
[0169] The feed-forward and closed-loop composite control method of the piezoelectric ceramic driver of the present embodiment, on the basis of embodiment 1, the described utilization of BP neural network to the proportional adjustment parameter k of the PID controller p , integral adjustment parameter k i , the differential adjustment parameter k d Ways to optimize include:
[0170] S1 determines the structure of the BP neural network, that is, determines the number of nodes in the input layer M and the number of nodes in the hidden layer Q, and gives the initial values of the weight coefficients of the input layer and the hidden layer and Select learning efficiency and inertia coefficient, at this time K=1;
[0171] S2 sampling to obtain the reference input rin(k) and the system output yout(k), and calculate the error at this moment e(k)=rin(k)-yout(k);
[0172] S2 calculates the input and output of the neurons in each layer of the BP neural network, and the output o...
Embodiment 3
[0207] The feedforward and closed-loop composite control system of the piezoelectric ceramic driver of this embodiment includes: a feedforward model unit, a PID controller, a PID parameter optimization unit, a sensor measurement unit, and a piezoelectric ceramic driver, wherein,
[0208] The feedforward model unit is used to obtain the initial drive voltage u of the piezoelectric ceramic driver according to the expected displacement r(t) input operation of the piezoelectric ceramic driver ε (t);
[0209] The sensor measuring unit is used to output the displacement of the piezoelectric ceramic driver, obtain the displacement of the piezoelectric ceramic in the piezoelectric ceramic driver, as the feedback signal of the closed-loop control of the PID controller;
[0210] The PID controller is used to control the initial driving voltage u according to the displacement of the piezoelectric ceramic driver and the displacement of the piezoelectric ceramic in the piezoelectric cerami...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More