

Control method for servo speed-regulation system with load acceleration feedback
A technology of speed regulation system and control method, which is applied in the field of artillery follow-up system, can solve the problems of shooting impact moment lag, etc., and achieve the effect of improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
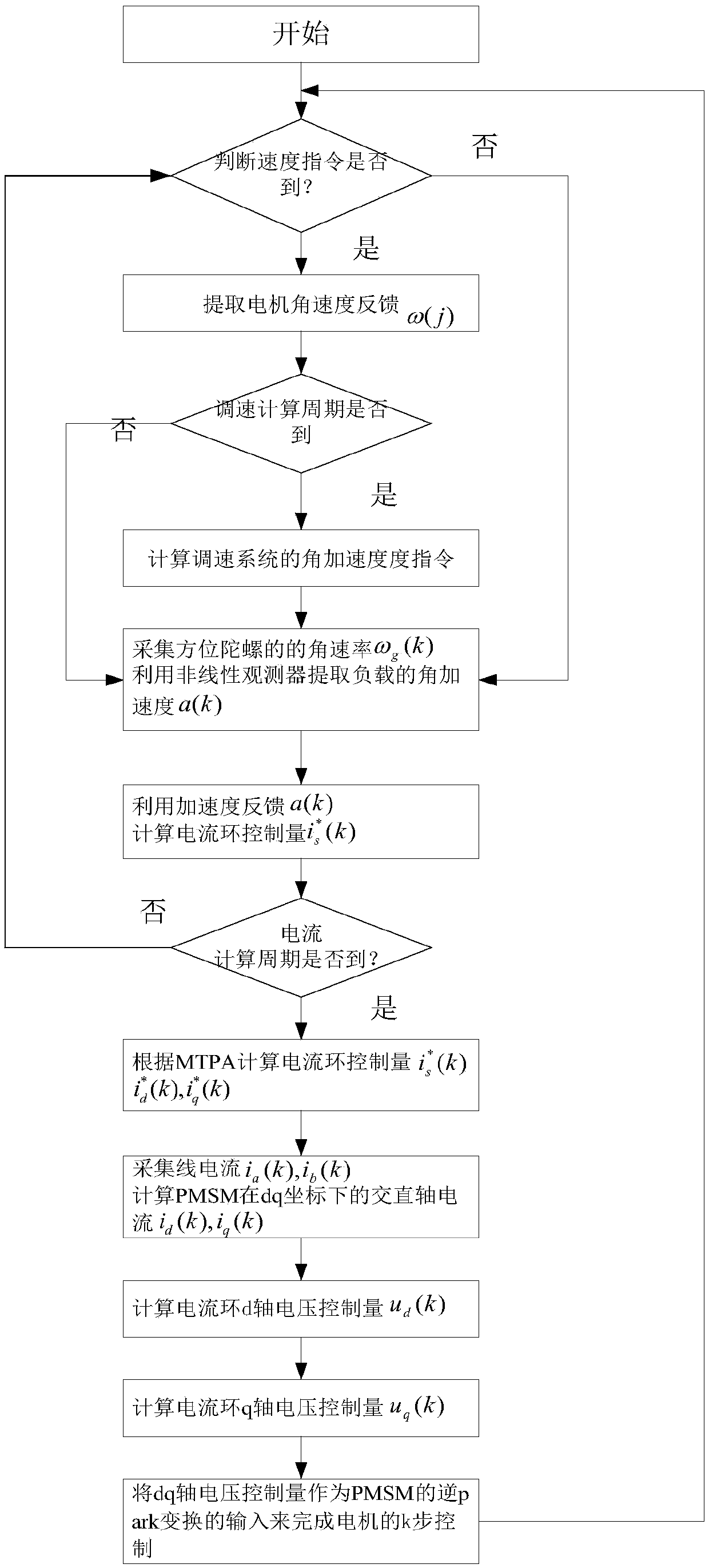
[0051] The steps that the present invention implements are:
[0052] (1) Judging the speed command ω * (j) Is it there? Yes, enter step (2), otherwise enter step (5), j is the number of steps of speed control;
[0053] (2) Extract motor angular velocity feedback ω(j);
[0054] (3) Is the calculation cycle of speed regulation up? Yes, go to step (4), otherwise go to step (5), the calculation period is T s ;
[0055] (4) Calculate the angular acceleration command a of the speed control system * (j);
[0056] e s (j)=ω * (j)-ω(j)
[0057] u ps (j)=K ps e s (j)
[0058]
[0059] u presats (j)=u ps (j)+u is (j)
[0060]
[0061] Among them: e s (j) is the speed error; u ps (j) is a proportional control item; u is (j) is the integral control item; u ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More