

Quadrotor unmanned aerial vehicle parameter distinguishing method based on improved shuffled frog leaping algorithm
A quad-rotor UAV and hybrid leapfrog algorithm technology, applied in the field of quad-rotor UAV parameter identification, can solve the problems of low parameter identification accuracy of quad-rotor UAV, slow identification speed convergence speed, etc. The effect of optimal strategy improvement and efficiency improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0054] Specific embodiments: the present invention is described in detail in conjunction with a typical quadrotor UAV motion model:
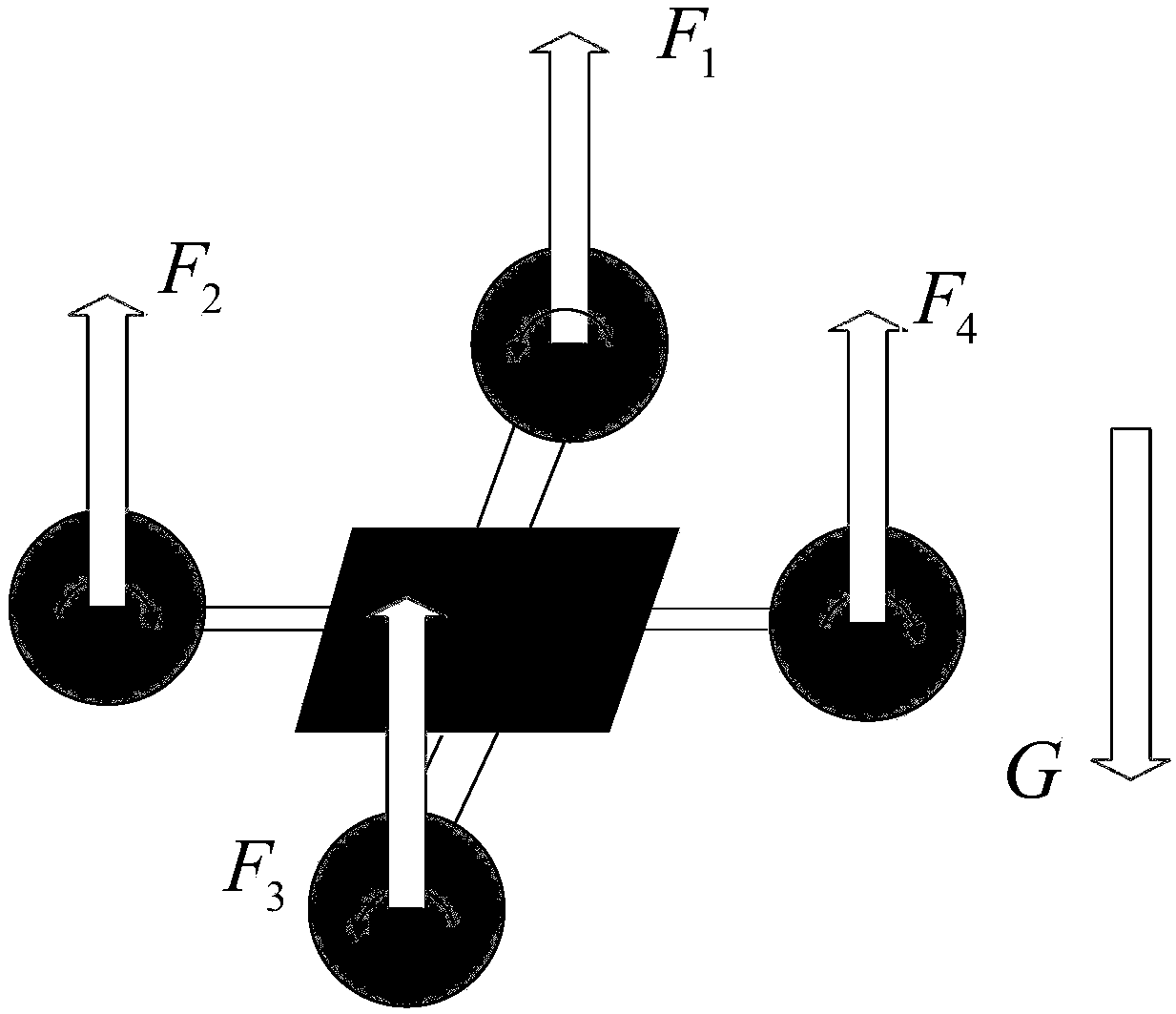
[0055] refer to figure 1 , the motion model of a typical quadrotor aircraft includes two parts: angular motion and position motion, and the motion equations are:
[0056]
[0057] Among them, x, y, and z are the three-axis positions in the inertial system, φ, θ, and ψ are the roll angle, pitch angle, and yaw angle, respectively, and I x , I y , I z are the moments of inertia of the three axes, J r is the moment of inertia of the rotor, m is the mass of the aircraft, u 1 is the lift generated by the rotor, u 2 , u 3 and u 4 are the roll, pitch and yaw moments, respectively, Ω i is the rotational speed of each rotor.
[0058] The input to the selection system is:
[0059] u=[u 1 u 2 u 3 u 4 u 5 ] T (8)
[0060] The system status is:
[0061]
[0062] The parameters to be identified are:
[0063] I param =[I x I ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More