

A method and system for calibrating the pose error of a mechanical arm
An error calibration and manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of low reliability of compensation accuracy, fitting errors of measurement points, inability to meet large workspace, multi-configuration and complex work. The law of state change and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
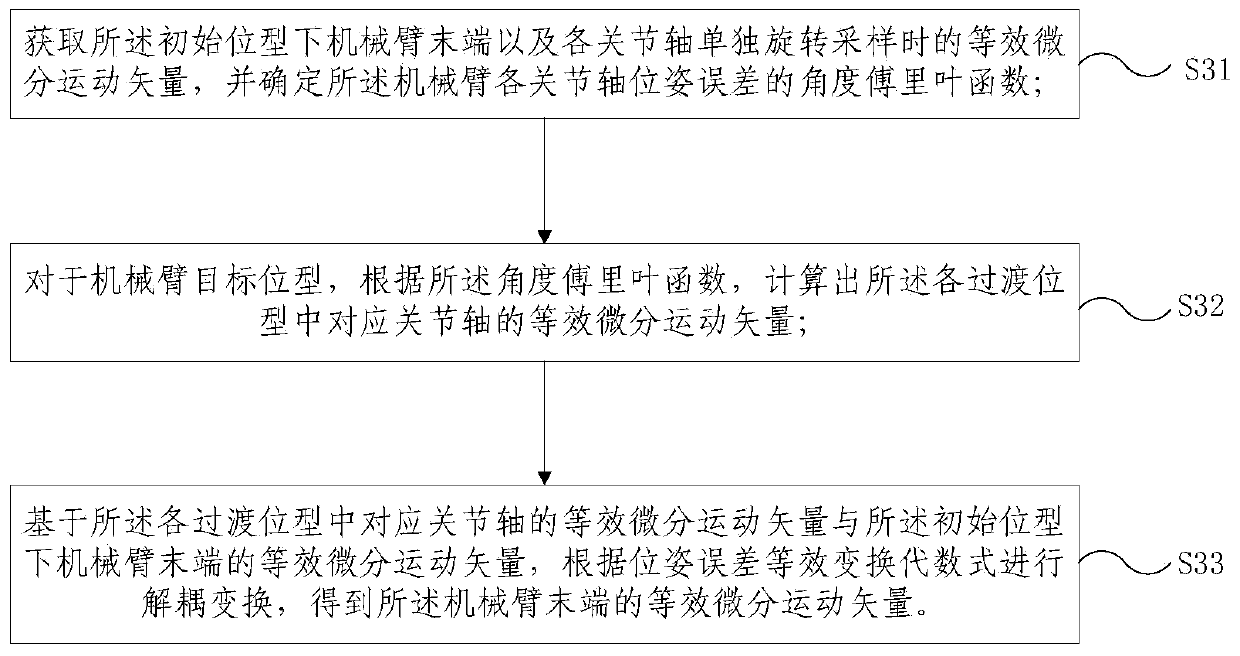
[0043] The present invention provides a method for calibrating the pose error of a manipulator, which includes: performing an equivalent differential transformation on the end pose error of the manipulator, and decomposing it into an equivalent differential motion vector when each joint axis of the manipulator moves independently, so that by The calibration and decoupling transformation of the pose error when each joint axis of the manipulator rotates and samples independently realizes the calibration of the pose error at the end of the manipulator.
[0044]Specifically, the main idea of the calibration method for the pose error at the end of the manipulator is to decomp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More