

Double-rate Kalman filtering method based on GNSS/INS deep integrated navigation
A technology of Kalman filtering and deep integrated navigation, which is applied in navigation through speed/acceleration measurement, radio wave measurement system, satellite radio beacon positioning system, etc. It can solve problems such as error and truncation error, and achieve small truncation error, The effect of reducing prediction error and reducing system error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] The invention discloses a dual-rate Kalman filtering method based on GNSS / INS deep integrated navigation. The invention will be further described below in conjunction with the accompanying drawings.
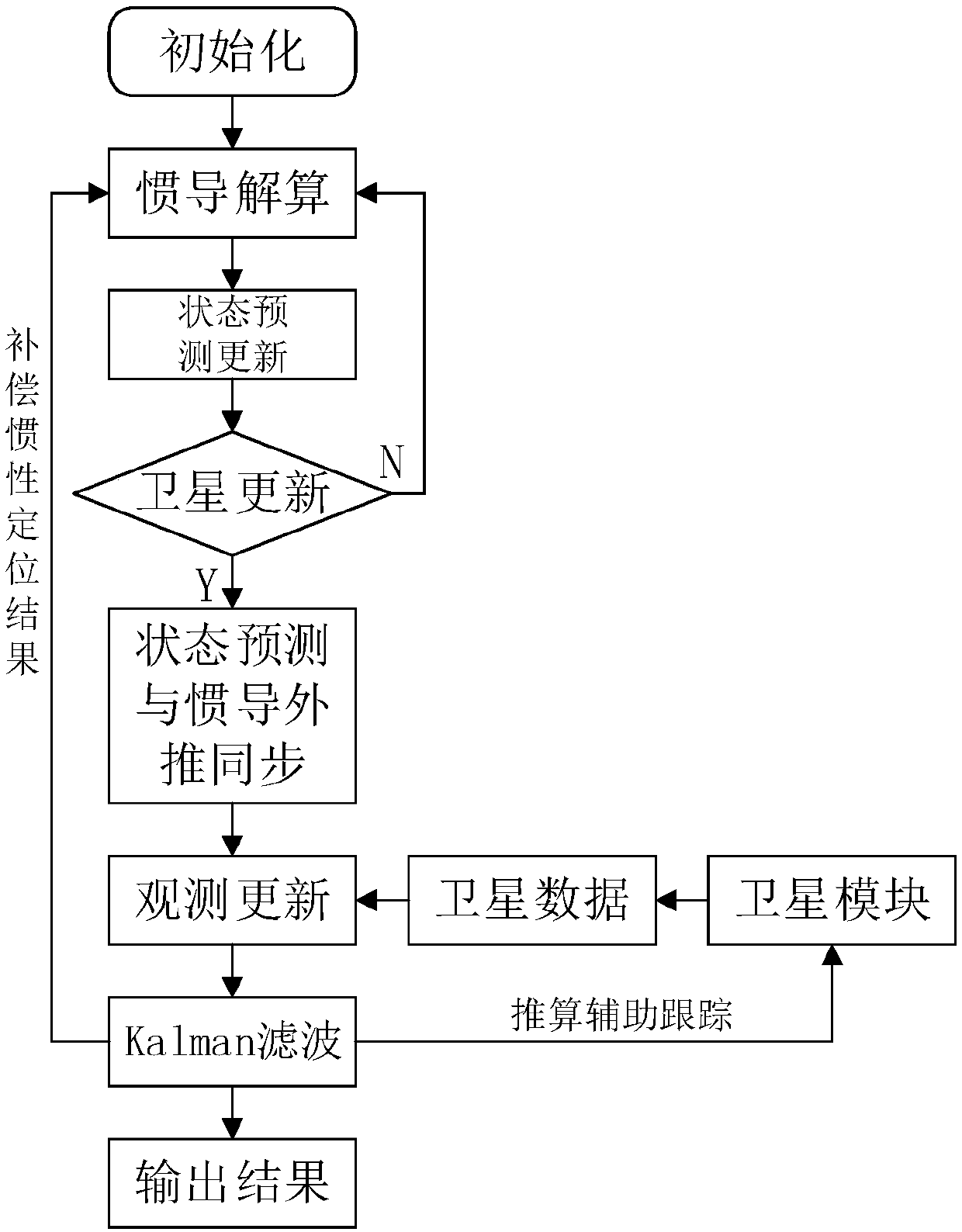
[0035] A dual-rate Kalman filter method based on GNSS / INS deep integrated navigation, such as figure 1 shown, including the following steps:
[0036] (1) Construct the state equation according to the initial position, velocity and attitude information of the carrier, and initialize the covariance error matrix P of the Kalman filter 0 , System noise covariance matrix Q 0 , observation error matrix R 0 ;
[0037] The 17-dimensional equation of state is:
[0038]
[0039] where the 3D parameters is the misalignment angle from the carrier system to the ECEF system, the 3-dimensional parameter is the velocity error in the ECEF system, the 3-dimensional parameter is the position error in the ECEF system, the 3D parameter b a is accelerometer bias, 3D parameter b g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More