

Inverse kinematics calculation method of six-freedom-degree wrist-biased serial robot
A robot kinematics and kinematics inverse solution technology, applied in the field of robot kinematics inverse solution, can solve the problems of poor real-time performance and large amount of calculation, and achieve the effect of good real-time performance, small amount of calculation, and small burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
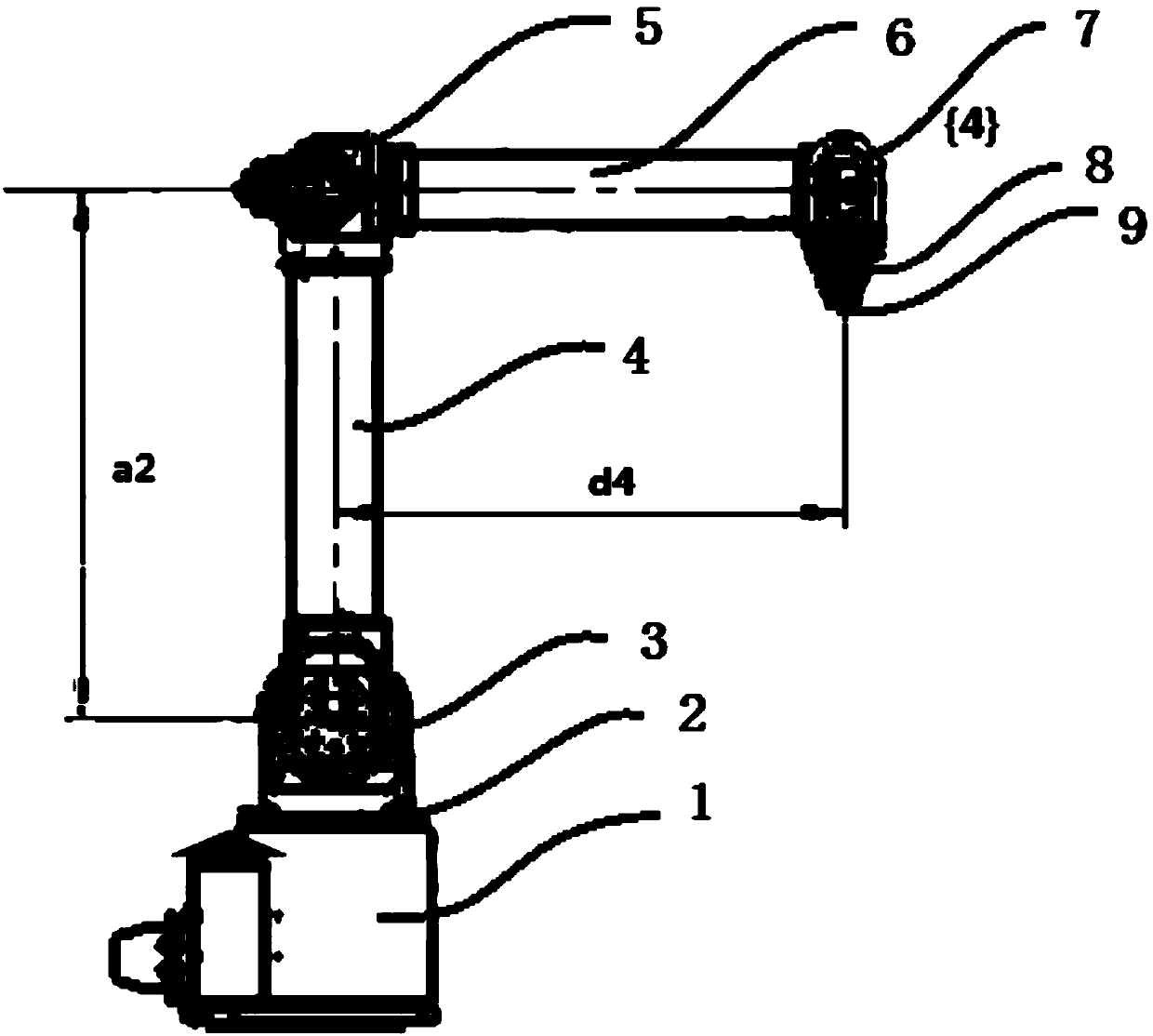
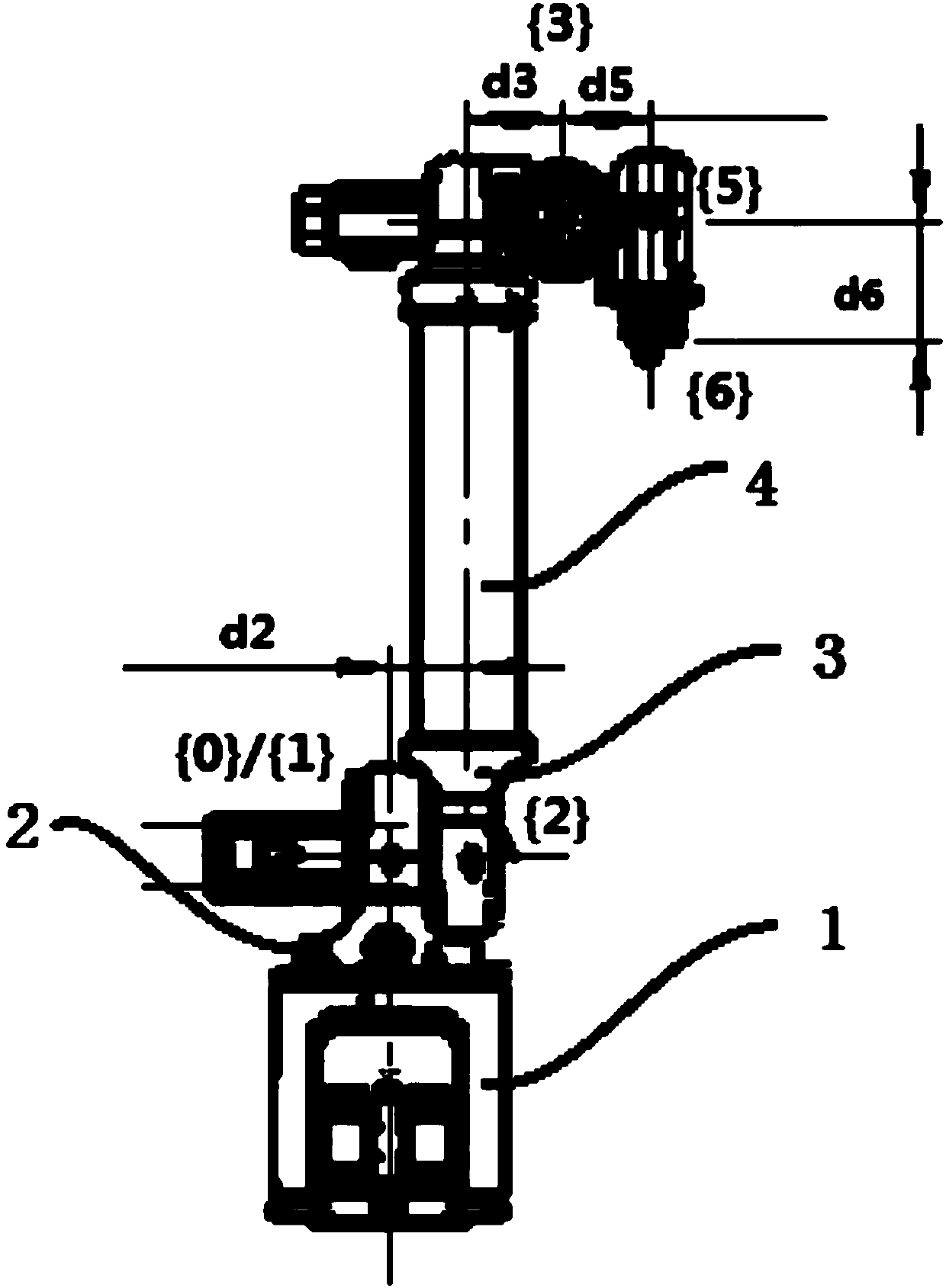
[0043] Reference figure 1 with 2 As shown, a six-degree-of-freedom wrist offset tandem robot referred to in the present invention includes a base 1, a first joint connected to the base 2, a second joint 3 connecting a first link 4 and a base 1, The first link 4, the third joint 5 connecting the first link 4 and the second link 6, the fourth joint 7 connected to the second link 6, the fifth joint connecting the second link 6 and the wrist 8 and wrist joint 9.
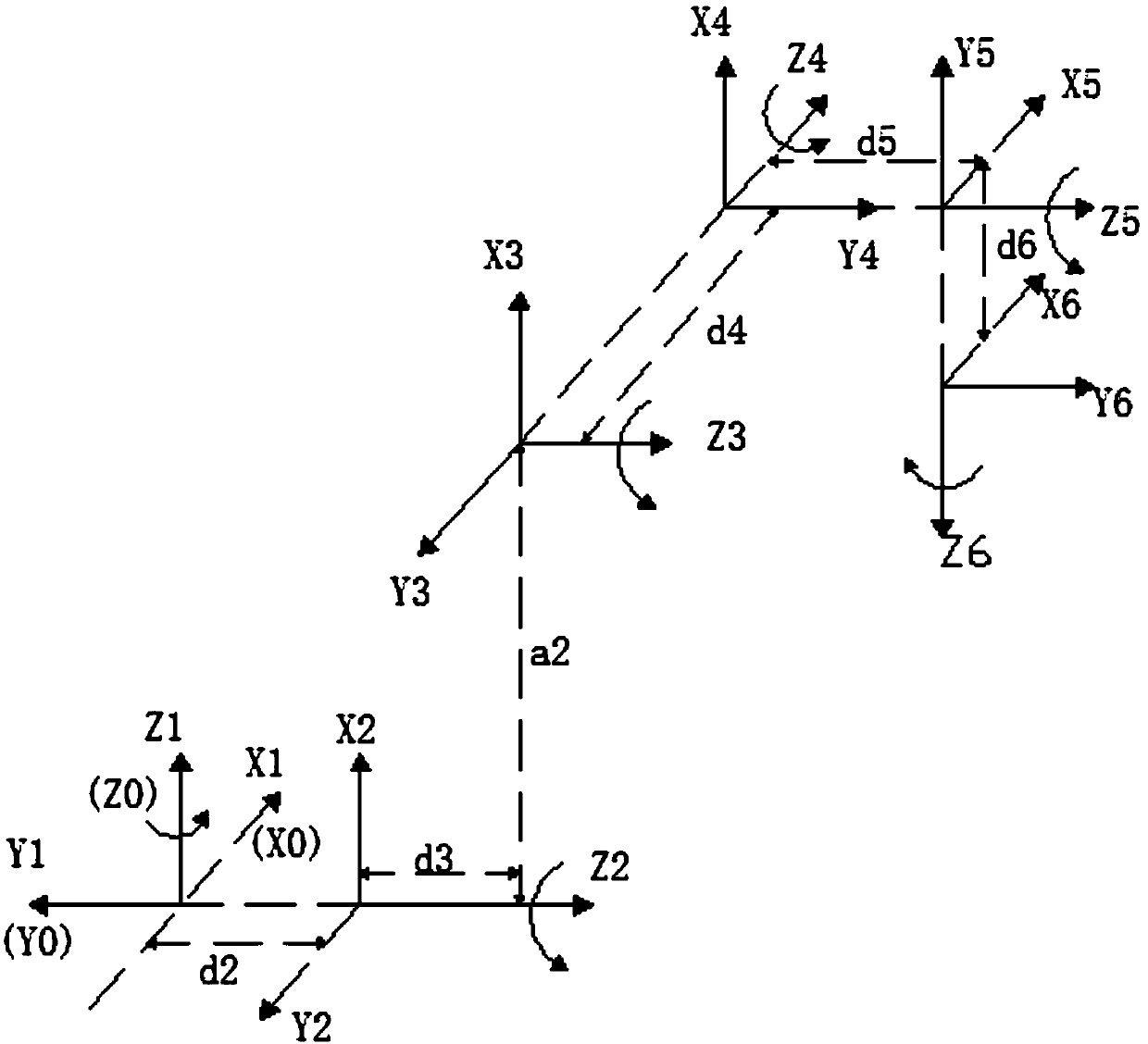
[0044] Reference image 3 Shown, according to figure 1 with 2 The six-degree-of-freedom wrist-offset tandem robot draws a schematic diagram of the spatial coordinates, taking the intersection of the first joint 2 rotation axis and the second joint 3 rotation axis as the origin, the straight line where the first joint 2 rotation axis is located is the coordinate system Z axis, and the second joint 3 The line where the rotation axis is located is the Y axis of the coordinate system, and the base coordinate system is establi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More