

Fault tolerance control method for space mechanical arm
A space manipulator, fault-tolerant control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of long sliding surface arrival time and large system chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
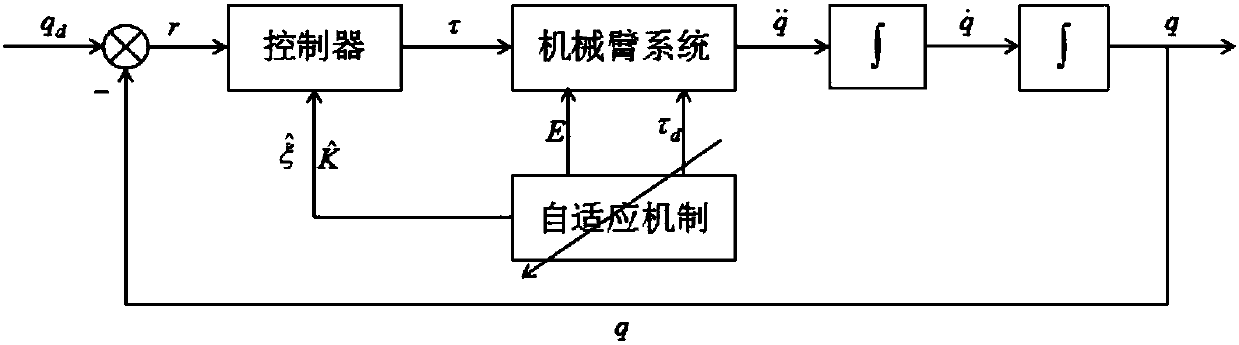
[0101] Such as figure 1 As shown, in order to trace the reference instruction q d , considering the actuator fault E in the manipulator system and the external disturbance τ d The existence of the self-adaptive algorithm can quickly estimate the minimum value of the two when the fault information and disturbance information are unknown, but it does not need to obtain a particularly accurate minimum value of the fault, so as to realize online real-time estimation of faults and disturbances, making A malfunctioning robotic arm system quickly follows the expected signal and continues to complete the task. The invention is a fault-tolerant control method of a space manipulator, comprising the following steps:
[0102] Step 1. Establish a general model of space manipulator dynamics,
[0103] q∈R n represents the joint position vector, represents the joint velocity vector, Indicates the joint acceleration vector; R n Represents an n-dimensional vector space;
[0104] H s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More