

Speed sensorless control method for large torque starting of asynchronous motor
A speed sensorless, asynchronous motor technology, applied in the direction of motor generator control, electronically commutated motor control, control system, etc., can solve problems such as large amount of calculation, reduced reliability, complex algorithm, etc., to achieve fast response, weaken the The effect of buffeting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings.
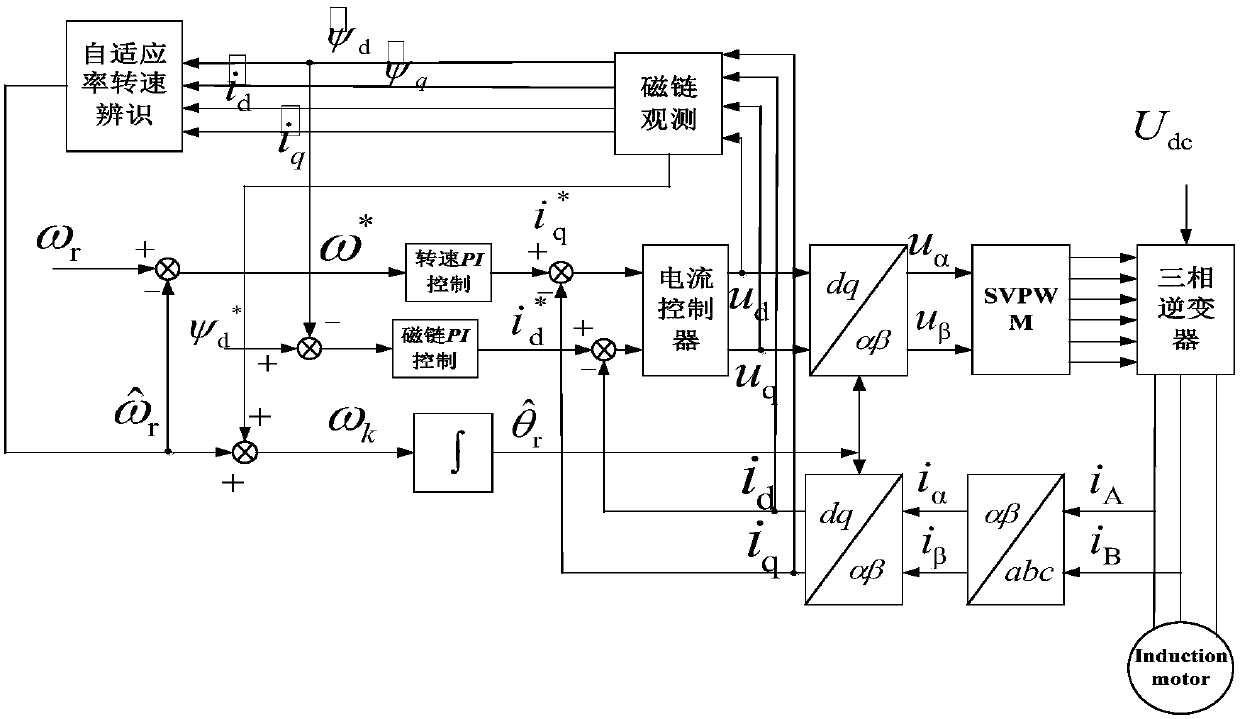
[0044] refer to figure 1 (can you attach figure 1 Make a brief description of the control block diagram, which can enrich the content of the manual and better explain the claims) (Based on the rotating coordinate method, combined with the model motor method, the adaptive law of the estimated speed is obtained through the Lyapunov nonlinear design method, And the sliding mode control method is used to control the current of the model motor to accurately locate the position angle of the rotor, so that the error between the model motor current and the actual motor current is zero, and it can efficiently realize high-torque startup.)
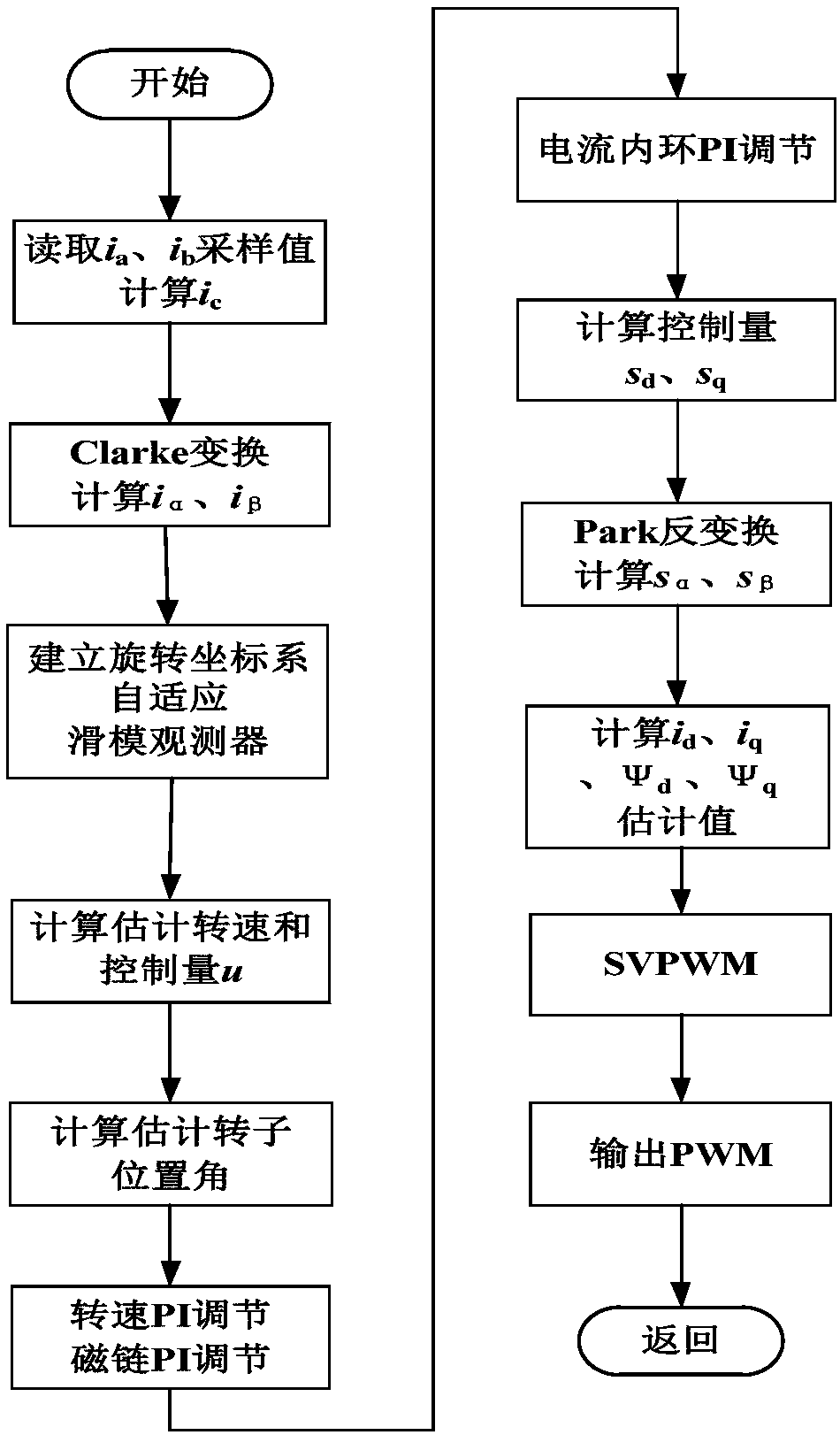
[0045] refer to figure 1 with figure 2 As shown in the flow chart of the present invention, a speed sensorless control method suitable for high-torque starting of asynchronous motors of the present invention includes:
[0046] 1. Acquis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More