

Vision-based six-degree-of-freedom small displacement detection method
A detection method and a technology of degrees of freedom, applied in the field of robotics, can solve the problem that the accuracy of the non-contact visual pose detection method cannot meet the requirements of multi-degree-of-freedom precision displacement detection accuracy, and achieve the effect of high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below in combination with specific embodiments.
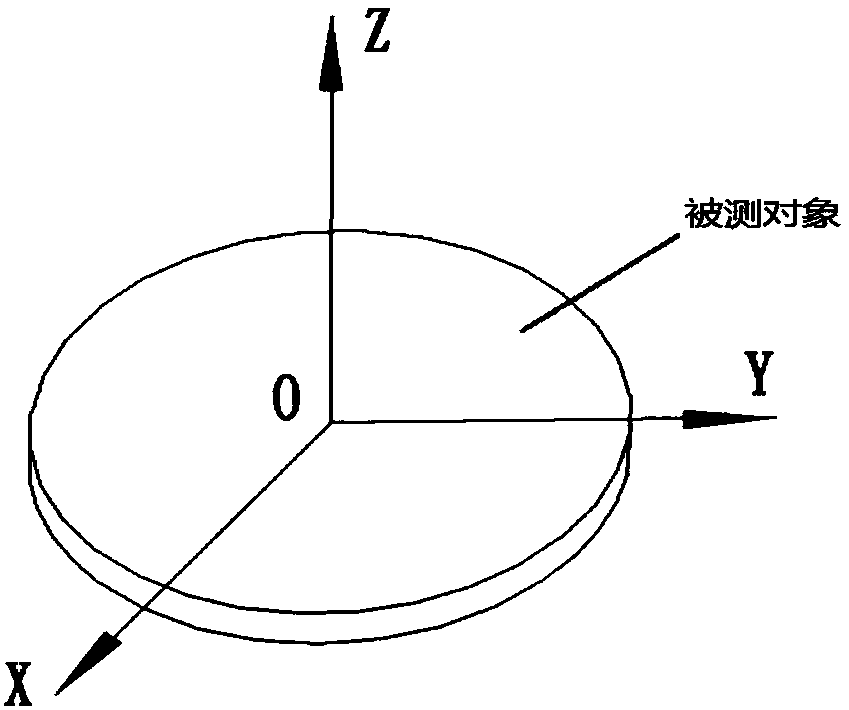
[0028] A circular disk is used as the object to be detected, and the center of its upper surface is as figure 1 Define the coordinate system OXYZ, where the XY plane is in the upper surface of the measured object, and Z is the normal direction of the upper surface of the measured object disc, then, record the displacements in the three translational degrees of freedom along the three coordinate axes are Tx, Ty, and Tz; record the rotational displacements on the three rotational degrees of freedom around the three coordinate axes according to the right-hand rule as Rx, Ry, and Rz. The method for detecting the small displacements of the six degrees of freedom proposed by the present invention will be described in detail below.
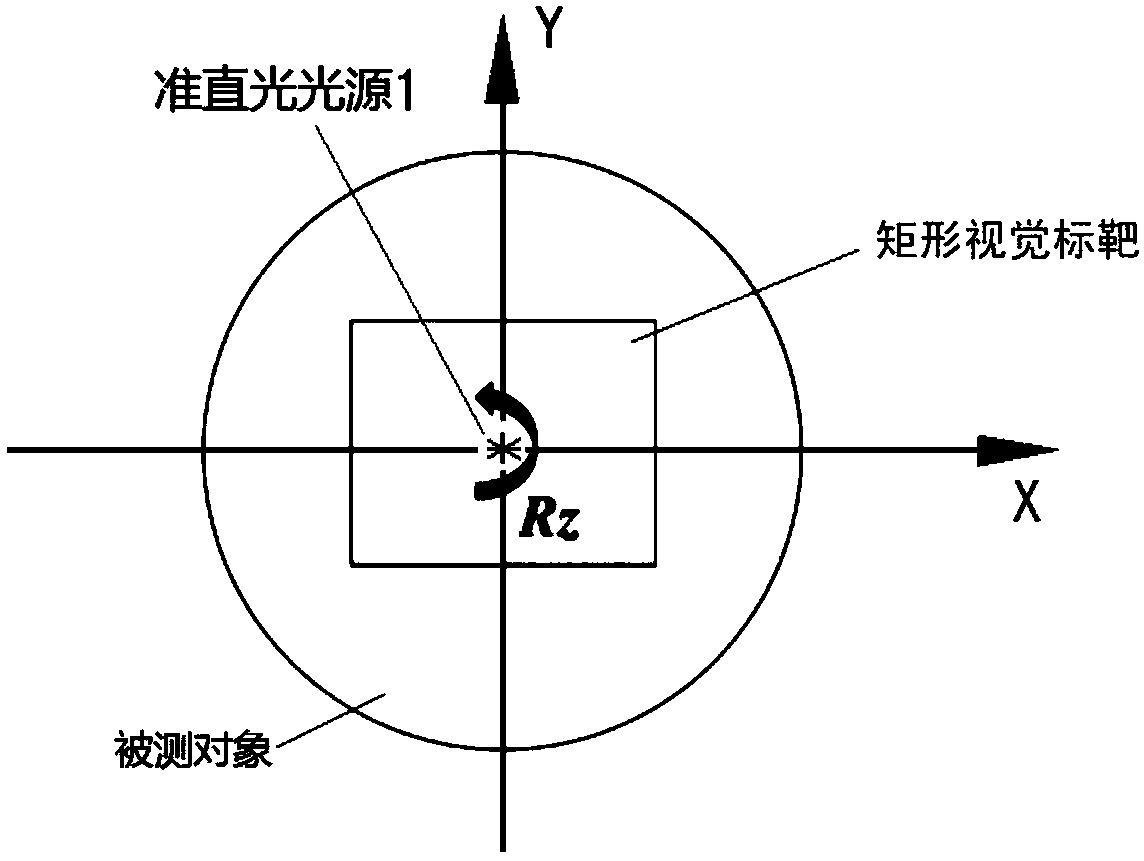
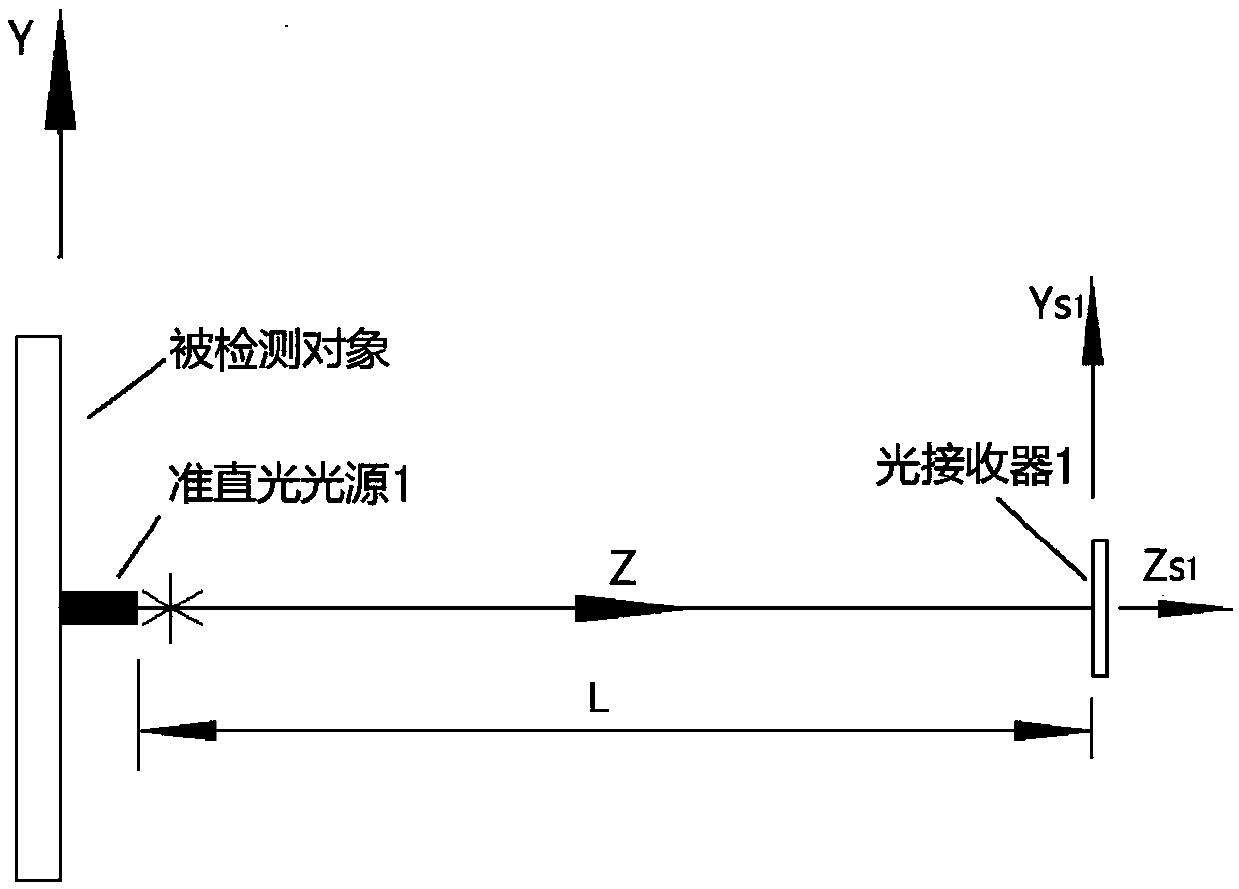
[0029] Step 1: First, see figure 2 with image 3 , set a rectangular visual target on the upper surface of the detected object, and set a colli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More