

A multi-channel electric steering gear control method
A technology of electric steering gear and control method, applied in multiple motor speed/torque control, multiple motor speed adjustment, computer control and other directions, can solve the problem of difficult FPGA development, long verification period, complex information interaction and interface processing and other problems, to achieve the effect of strong applicability and isolation function, effective miniaturization requirements, and reliable and stable on-chip resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
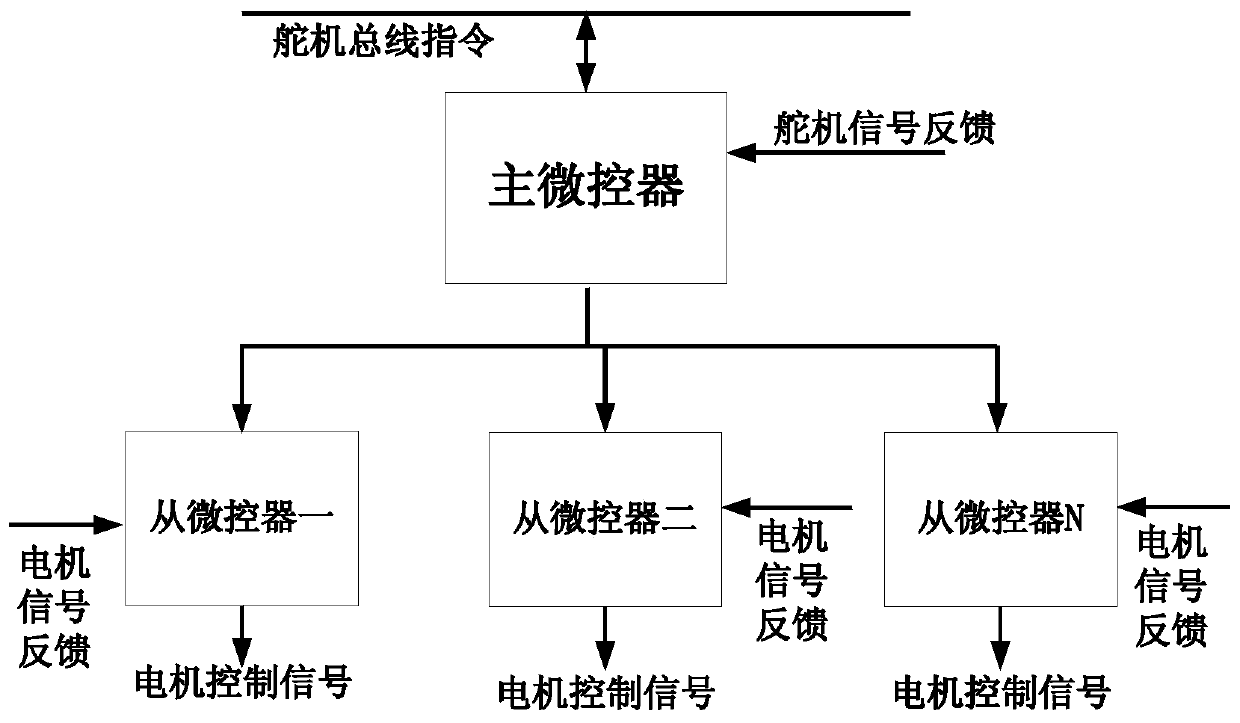
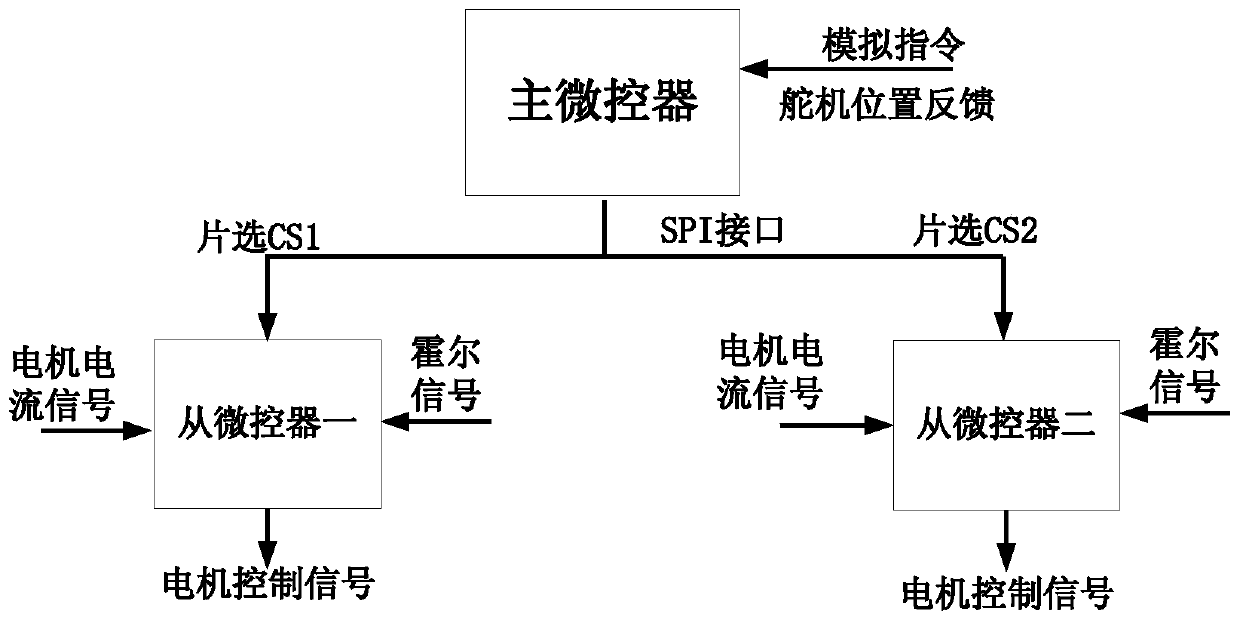
[0059] A control method of a four-channel electric steering gear based on a brushless DC motor is realized. The position feedback of the electric steering gear is DC feedback, and the analog command of the steering gear comes from the analog command given by the signal generator. The motor is a DC brushless motor, and the position feedback of the motor is a three-phase signal of Hall_A, HALL_B, and HALL_C. The realization scheme of this method chooses MPC5644A signal of FREESCALE Company as the main microcontroller, and chooses MC56F84789 of FREESCALE Company from the microcontroller.
[0060] The main microcontroller MPC5644A uses the AN_0 channel of its on-chip 12-bit enhanced EQADC converter to collect the servo 1 position feedback, the AN_1 channel to collect the servo 2 position feedback, the AN_2 channel to collect the servo 3 position feedback, and the AN_3 channel to collect the servo 4 position Feedback, the AN_4 channel collects analog instructions; implements the c...
Embodiment 2
[0065] A control method of a four-channel electric steering gear based on a permanent magnet synchronous motor is realized. The position feedback of the electric steering gear is AC feedback, which can be converted into a DC signal by designing a second-order filter current. The analog command of the steering gear comes from the digital command given by the RS485 bus. The motor is a permanent magnet synchronous motor, and the feedback of the motor is a resolver sine and cosine signal. The realization scheme of this method chooses MPC5644A signal of FREESCALE Company as the main microcontroller, and chooses MC56F84789 of FREESCALE Company from the microcontroller.
[0066] The main microcontroller MPC5644A uses the AN_0 channel of its on-chip 12-bit enhanced EQADC converter to collect the servo 1 position feedback, the AN_1 channel to collect the servo 2 position feedback, the AN_2 channel to collect the servo 3 position feedback, and the AN_3 channel to collect the servo 4 pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More