

Aerial photography image calibration method for unmanned aerial vehicle suitable for plane measurement
An image calibration and plane measurement technology, applied in image enhancement, image analysis, image data processing, etc., can solve the problems of inability to obtain calibration results in real time, complex implementation process, and high technical requirements, and achieve real-time UAV calibration. And the effect of measurement, clear process and high calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
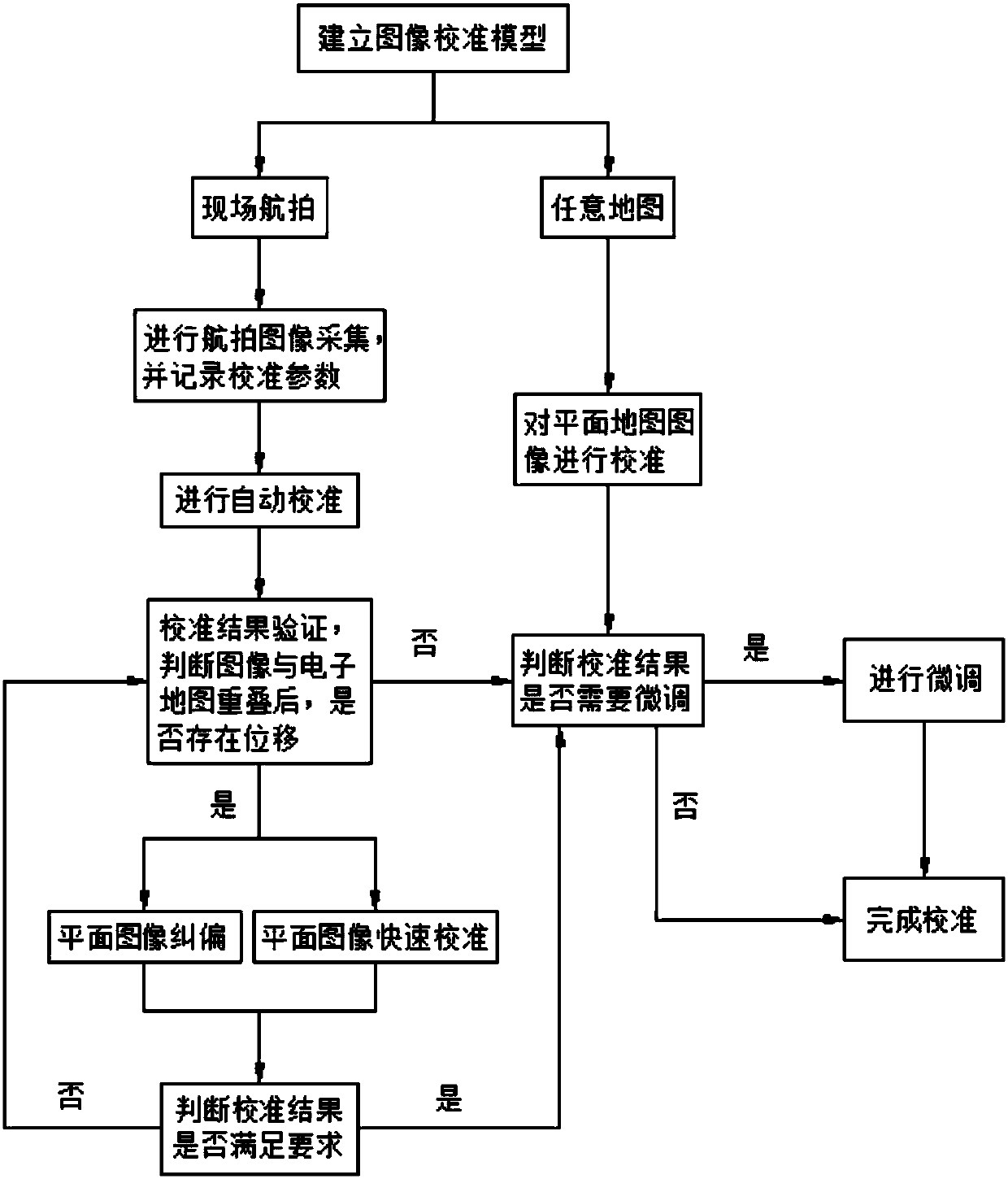
[0122] Such as figure 1 As shown, a UAV aerial image calibration method suitable for plane measurement includes the following steps:
[0123] a. Establish an image calibration model using three parameters: image azimuth Azimuth, image scale Scale, and image origin Origin;
[0124] b. Calibrate the planar map image or conduct on-the-spot acquisition and self-calibration of the planar map to obtain preliminary calibration results;
[0125] c. If the preliminary calibration result is the result of calibrating the planar map image, proceed to step f; if the preliminary calibration result is the result of field collection and self-calibration of the planar map, proceed to step d;
[0126] d. Verify the calibration results of the preliminary calibration results. By superimposing the calibrated images on the electronic map, check the overlapping effect. If it is completely or basically overlapped or meets the surveying and mapping requirements, go to step f; if there is displacement...
Embodiment 2
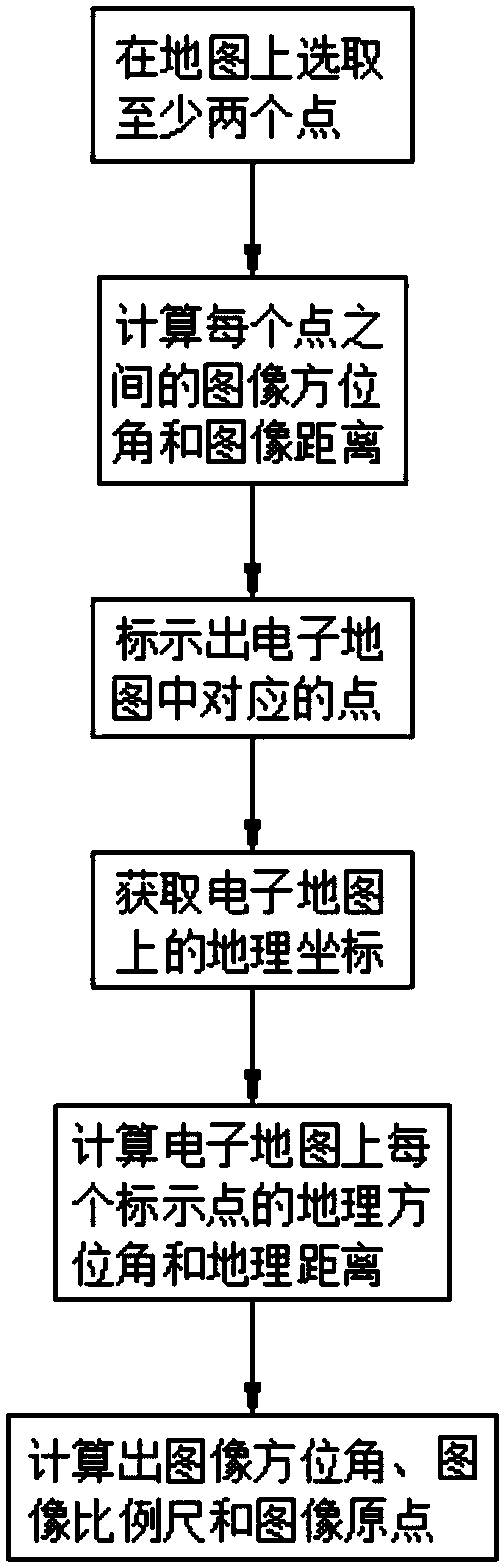
[0152] This embodiment is on the basis of embodiment 1, as figure 2 As shown, the specific steps for calibrating the plane map image in the step b are as follows:
[0153] b1. Select at least two image points on the planar map;
[0154] b2. Calculate the image azimuth picAzimuth and the image distance picDistance between two adjacent image points;
[0155] b3. Mark the corresponding marked points in the electronic map according to the selection order of the image points, and obtain the geographical coordinates of the marked points on the electronic map during the marking process, and pair them with the corresponding image points;
[0156] b4. Calculate the geographic azimuth MapAzimuth and the geographic distance MapDistance between adjacent marked points on the electronic map;
[0157] b5. Calculate the image azimuth Azimuth, the image scale Scale, and the image origin according to the acquired image azimuth picAzimuth, image distance picDistance, geographic azimuth MapAzi...
Embodiment 3
[0160] In this embodiment, on the basis of Embodiment 2, in the step b5, the image azimuth angle Azimuth, the image scale Scale and the image origin are calculated in the following manner, wherein:
[0161] Image azimuth Azimuth: Azimuth=MapAzimuth-picAzimuth;
[0162] Image scale Scale: Scale=MapDistance÷picDistance;
[0163] Image Origin: Calculate the image coordinates of Origin according to the image size of the planar map, and obtain a marked point A and the geographic coordinates of A; the image azimuth from A to Origin is added to Azimuth to get the geographic azimuth rotation from A to Origin, A Multiply the image distance to Origin by Scale to get the geographic distance length from A to Origin, and use the length, rotaion, and geographic coordinates of A to get the geographic plane coordinates of Origin through the geographic coordinate conversion method. So far, according to the calibration model that has been calibrated, the geographic coordinates of each image po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More