

Mobile robot pose estimation method based on RFID
A mobile robot, pose estimation technology, applied in the direction of instruments, positioning, short-distance communication services, etc., can solve the problems of target tracking and positioning, influence, positioning error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
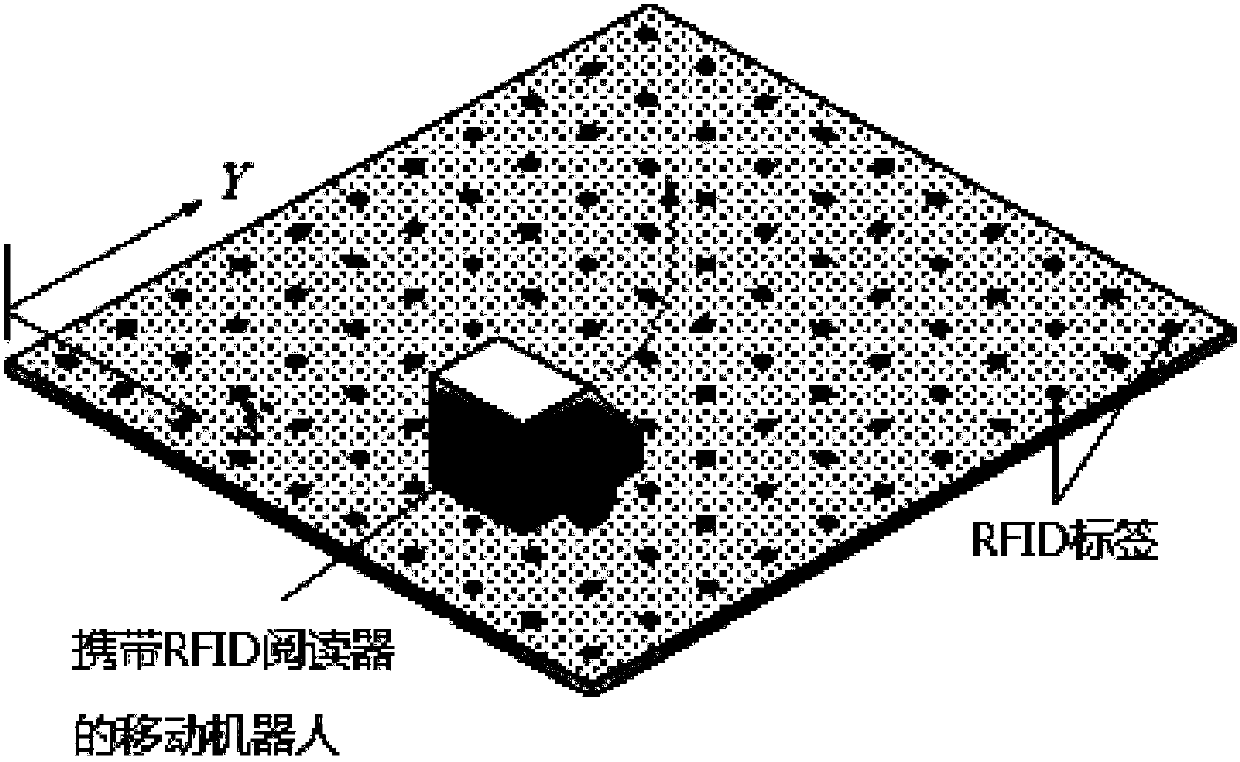
[0071] like figure 2 Shown, before the experiment of the present invention, fix RFID tag, move RFID reader, measure signal strength value every 5cm, measure 20 times and get average value to each position, obtain p( in formula (1) by curve fitting d 0 )=-45.63, n=1.832. During the experiment, the robot continuously reads the signal strength value of each reference tag 20 times at the planning point.
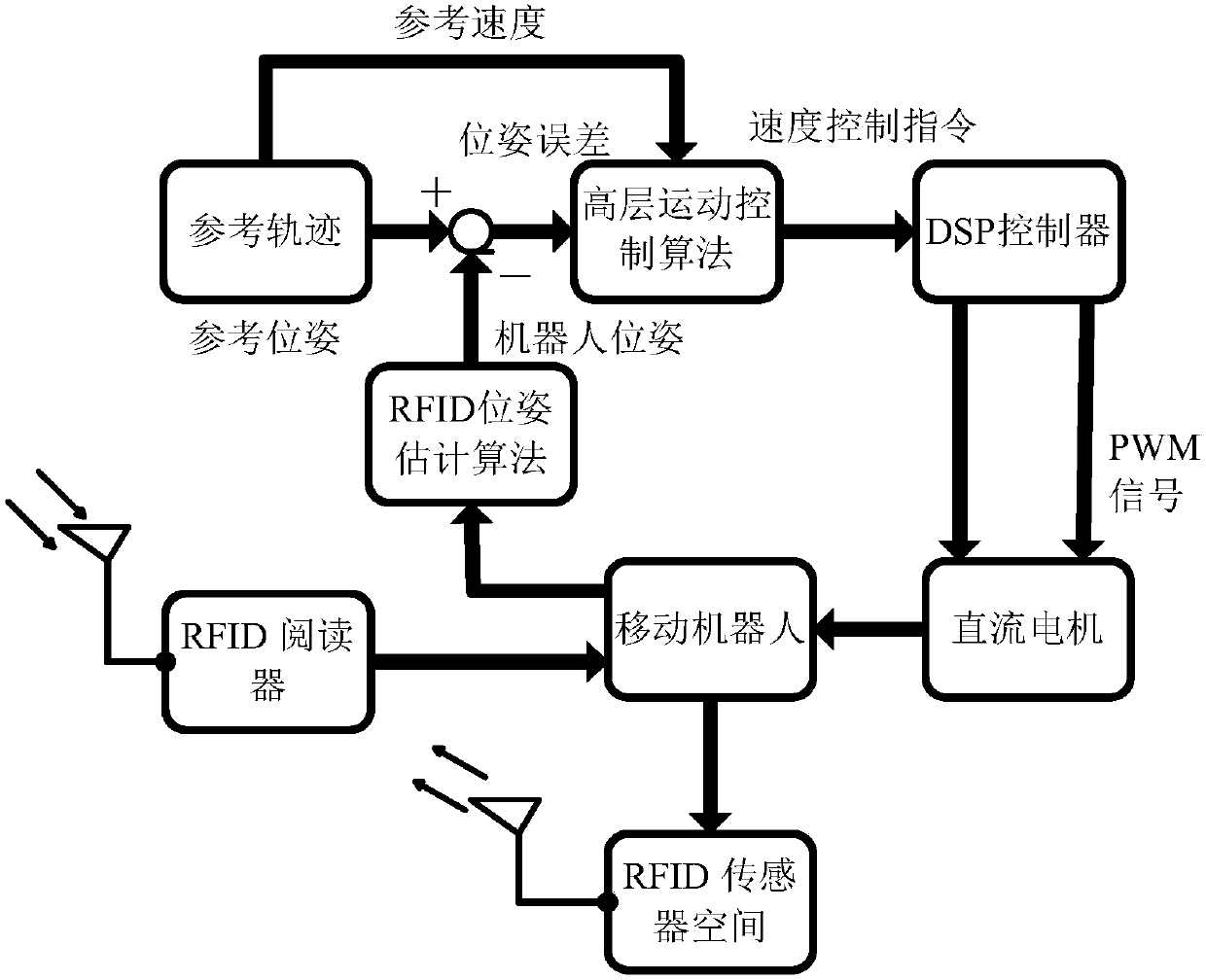
[0072] A method for estimating the pose of a mobile robot based on RFID mainly includes:
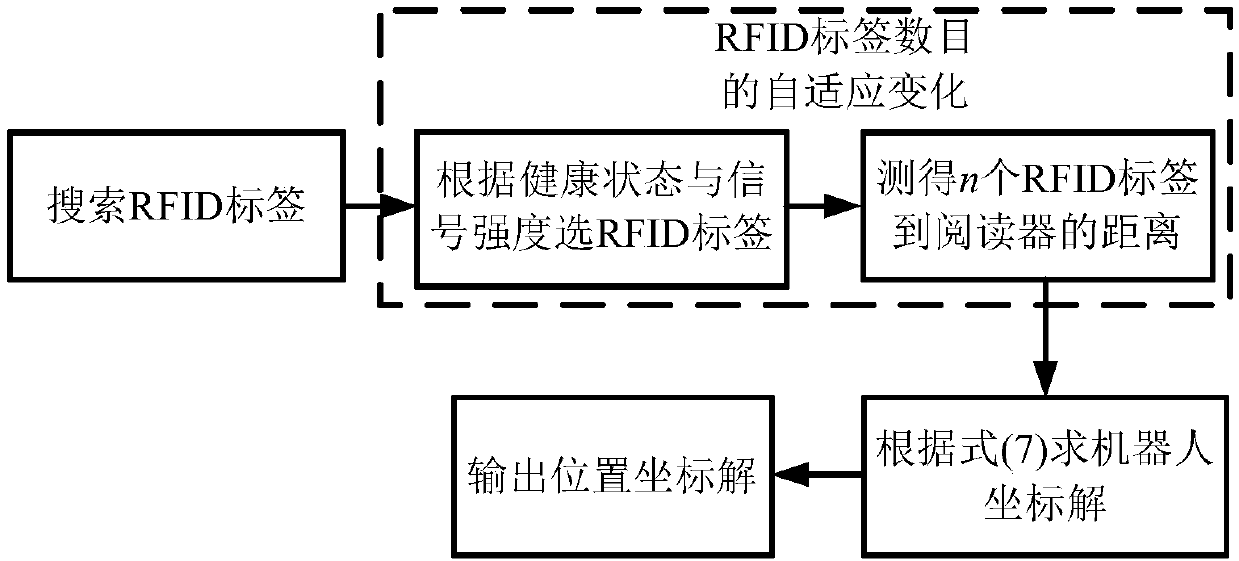
[0073] Step 100: location coordinate estimation algorithm based on RFID received wireless signal strength;
[0074] Step 200: Estimation of the orientation angle θ of the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More