Non-invasive measurement method of wrist joint axis motion model
A technology of motion models, measurement methods, applied in the fields of ergonomics and measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0049] The specific steps of the present invention are as follows:
[0050] 1. Data measurement
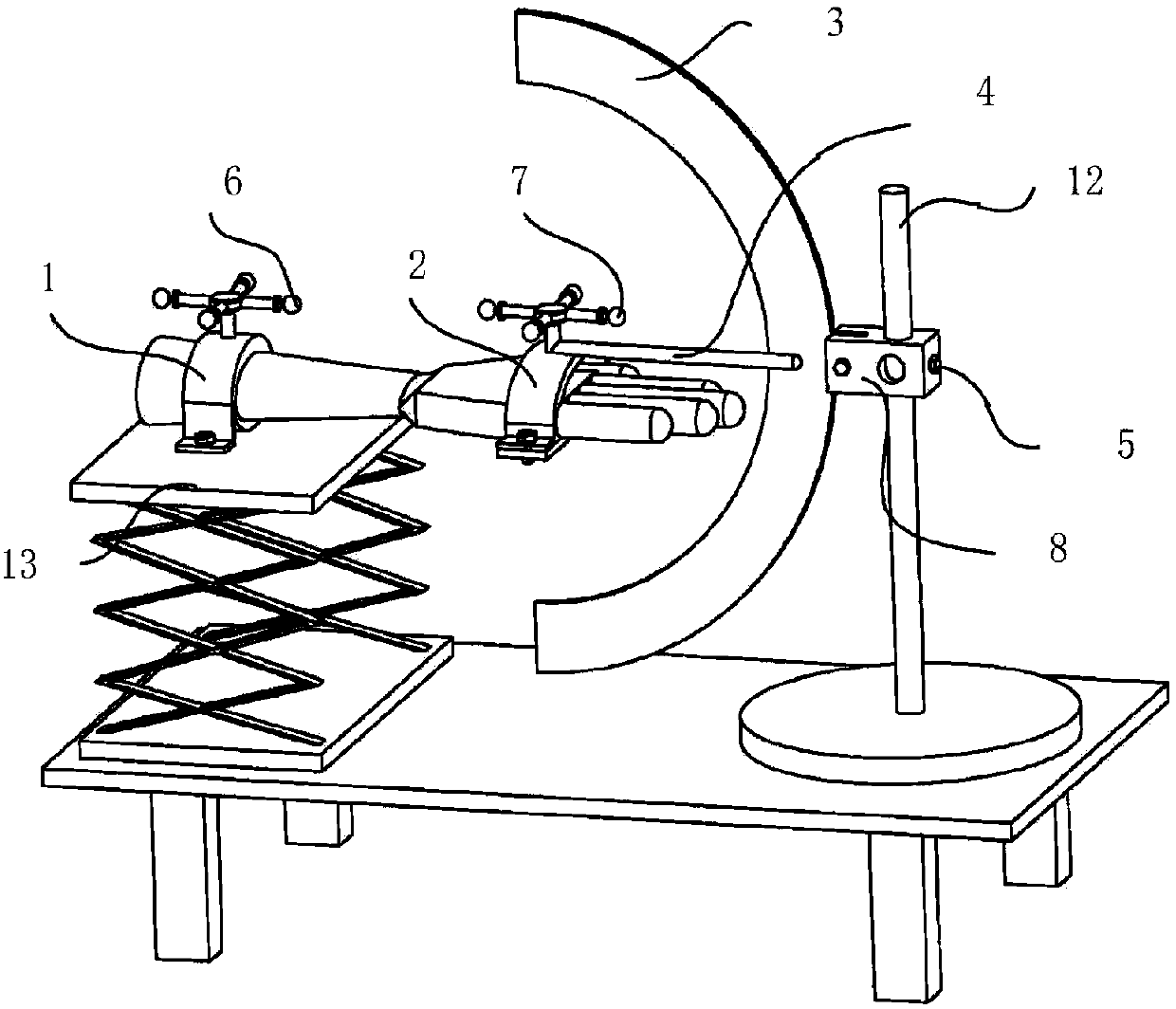
[0051] Such as figure 1 As shown, 8 marker points are placed on the tester's hand and forearm, and the positions of the 8 marker points are collected by the vicon optical motion capture system. Take flexion and extension exercises as an example. During the experiment, when collecting flexion / extension exercise data, the wrist moves from flexion to extension for three cycles.
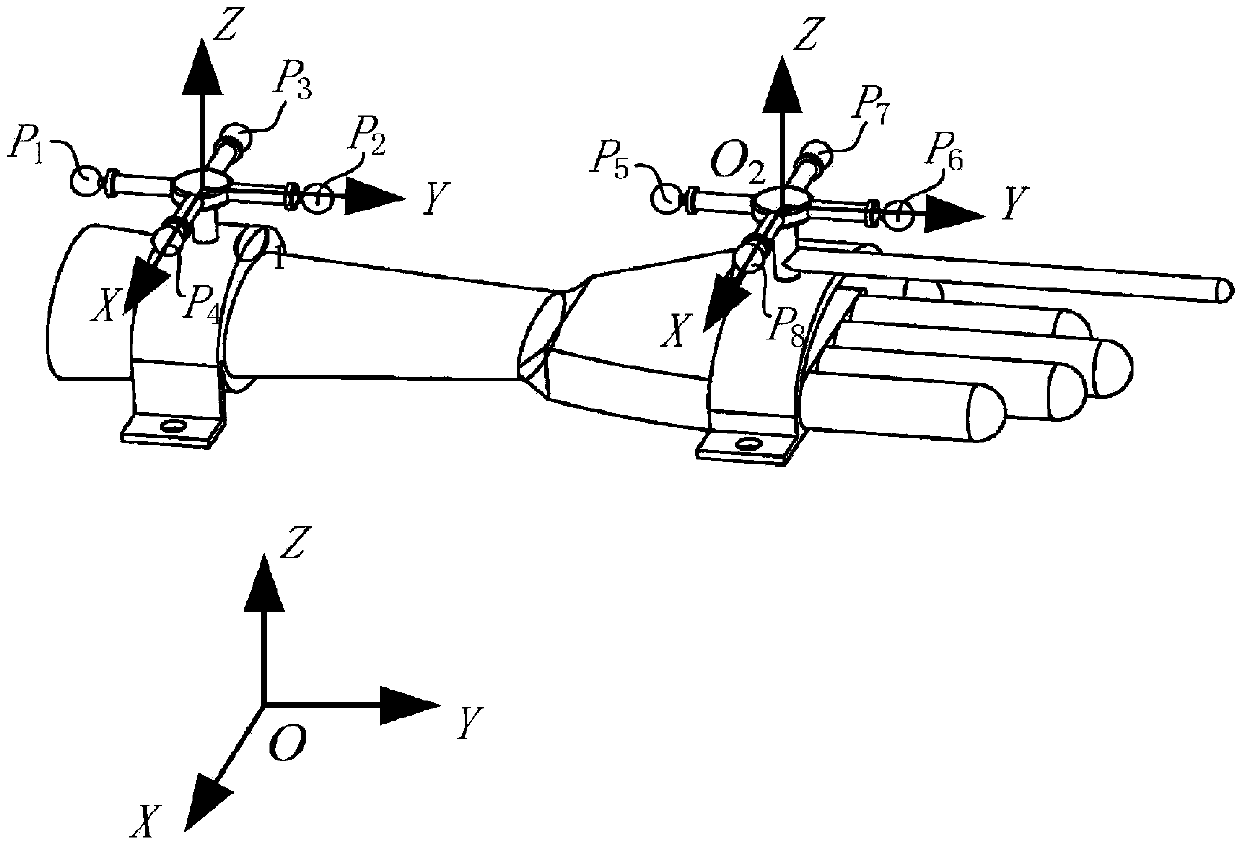
[0052] At time t, the positions of the 8 mark points are:
[0053] P 1 (235.6984 219.5886 960.4167),P 2 (236.211 295.7337 957.716),
[0054] P 3 (194.9982 258.908 957.5391),P 4 (273.4254 256.3104 959.5434),
[0055] P 5 (180.4009 409.6366 942.4073),P 6 (233.7286 467.6213 947.0558),
[0056] P 7 (235.792 412.195 946.8046),P 8 (178.0265 466.1292 942.5173).
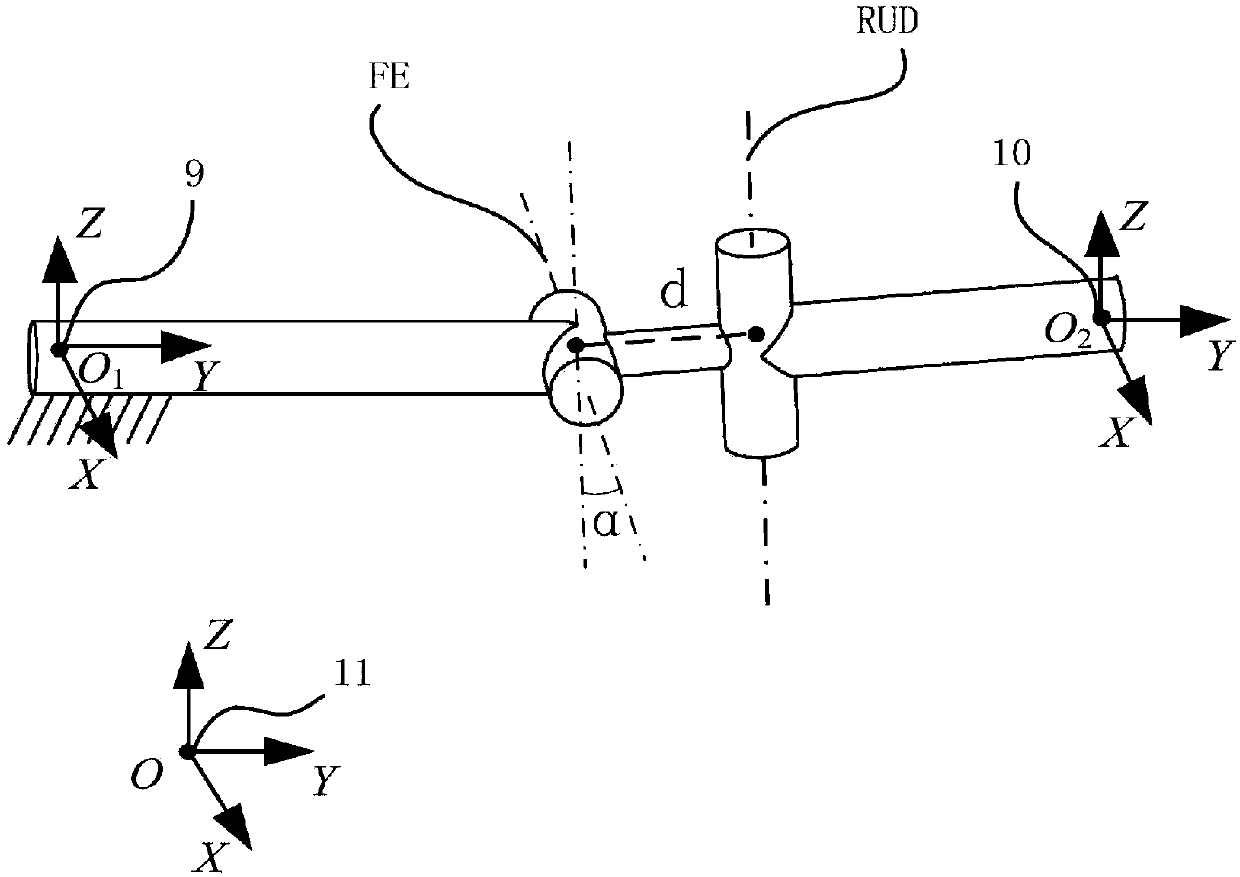
[0057] From equation (1), the forearm local coordinate system O 1 (9) Origin:
[0058] O 1 (235.0832 257.6352 958.8038), x, y, z axis is: O 1x (0.9991,-0.0331,0.0255)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com