

ORB algorithm-based cognitive map construction method
A technology of cognitive maps and construction methods, applied in computing, computing models, navigation computing tools, etc., can solve the problems of visual processing prone to perceptual deviation, and achieve the effect of improving speed, reducing perceptual deviation, and improving robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
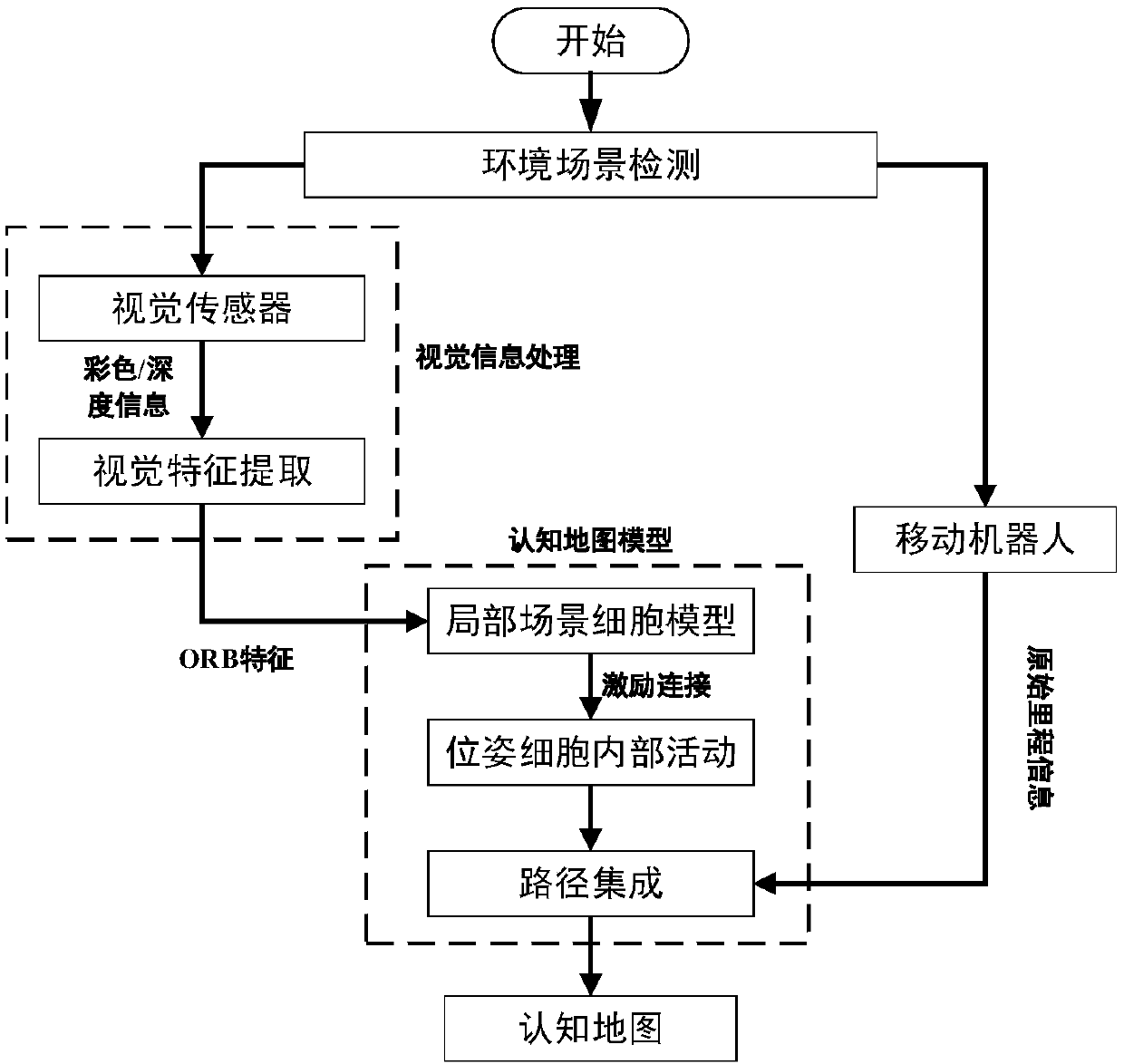
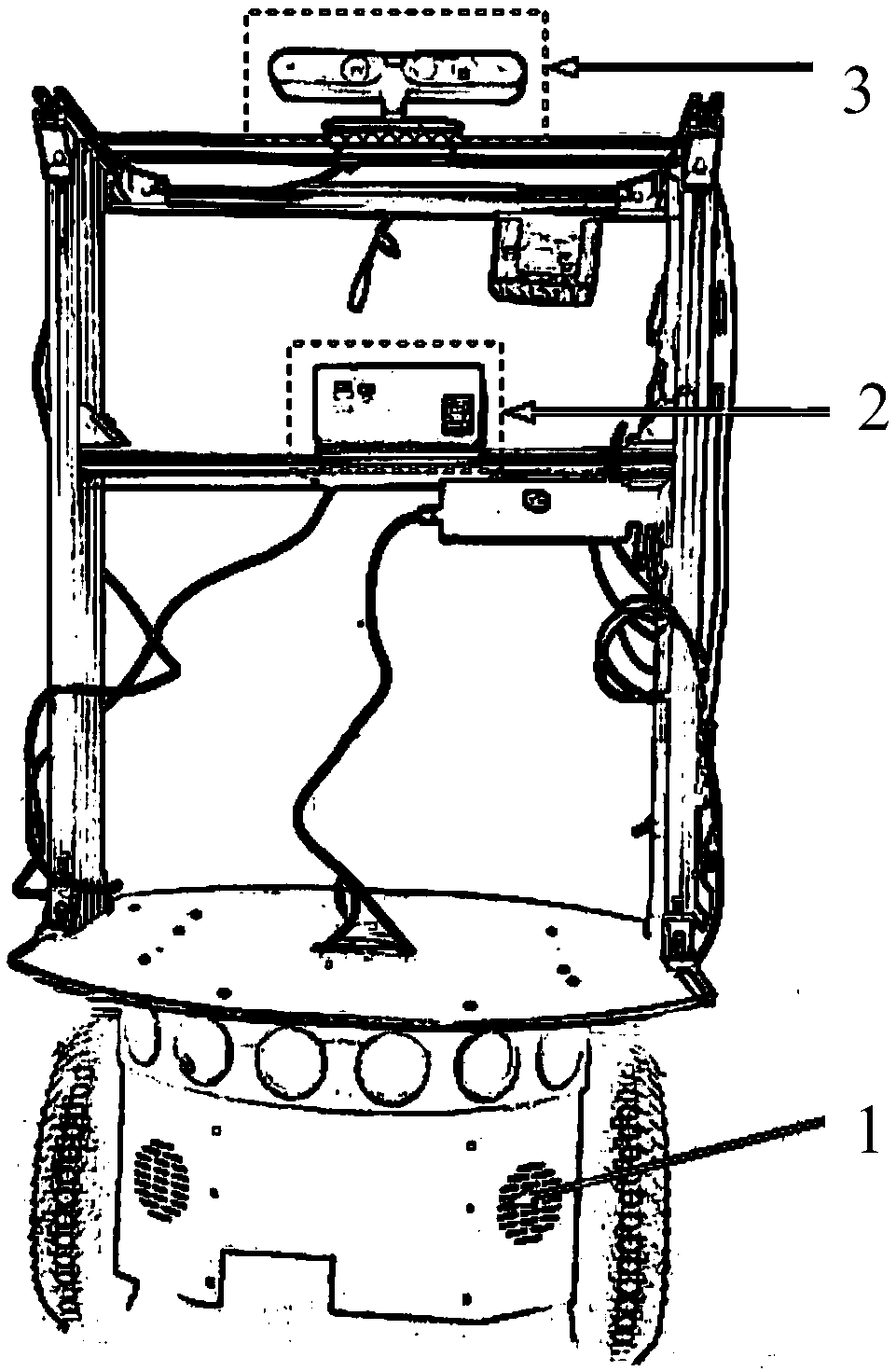
[0036] attached figure 1 It is a system flow chart of the cognitive map construction method based on the ORB algorithm, with figure 2 It is a mechanical platform for realizing the cognitive map construction method based on the ORB algorithm, which mainly includes a robot mobile platform 1, and the robot mobile platform 1 is provided with a visual sensor 2 and a computing unit 3, and the robot mobile platform 1 is directed to all The computing unit 3 provides mileage information, and the visual sensor 2 provides RGB image information and depth information to the computing unit 3 . In this embodiment, the computing unit 3 is a computer GIGABYTE ini PC; the visual sensor 2 is an Xtion pro live depth-of-field camera.
[0037] At first several nouns among the present invention are explained as follows:
[0038] Pose cell model: use the attractor network to simulate a th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More