

AGV (Automatic Guided Vehicle) flow space-time interference detection and avoidance method in time-varying environment
An interference detection, space-time technology, applied in non-electric variable control, instruments, navigation calculation tools, etc., can solve problems such as task lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
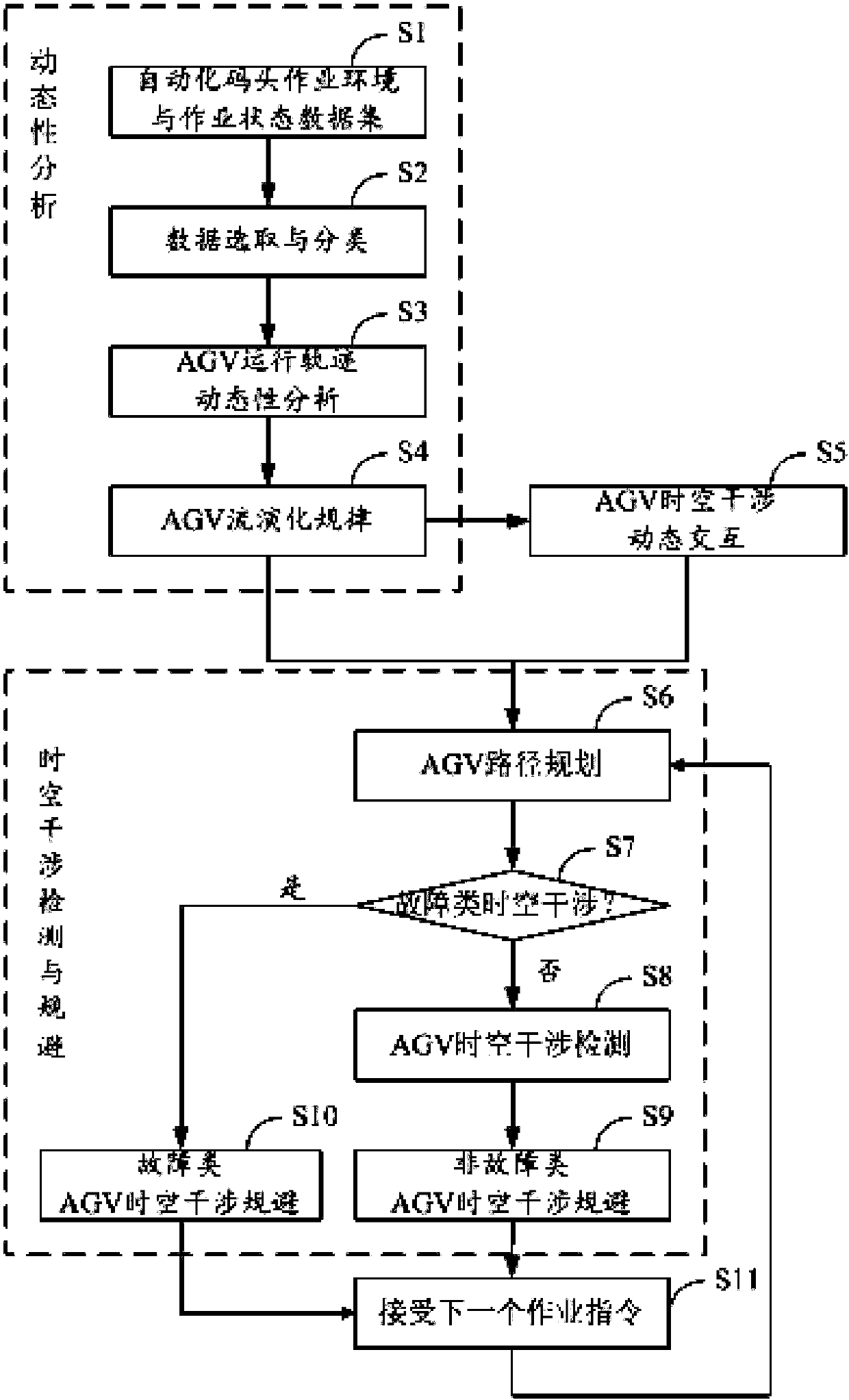
[0072] based on the following Figure 2 ~ Figure 6 , specifically explain the preferred embodiment of the present invention.
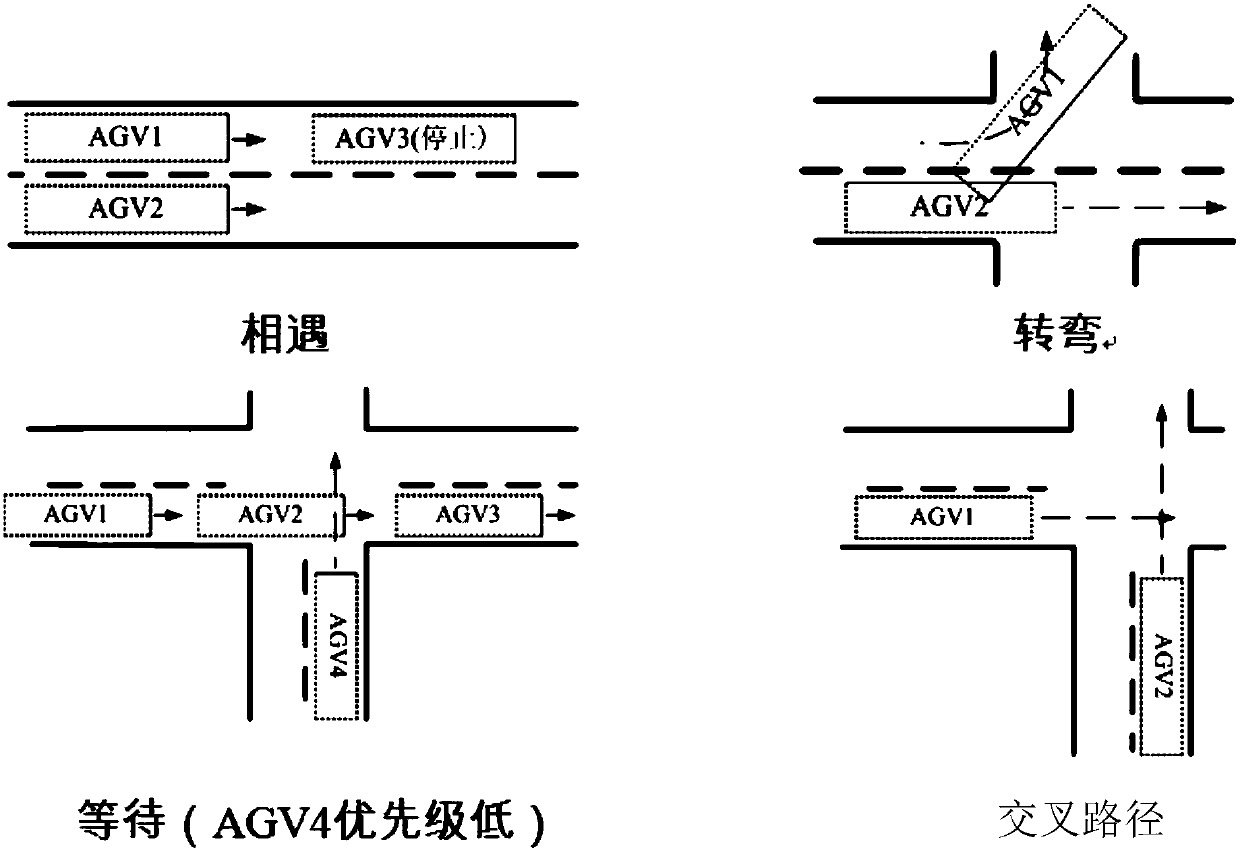
[0073] The inherent time-varying uncertain characteristics of the automated terminal have a significant impact on the operation of the AGV, resulting in the temporal and spatial uncertainty of the AGV trajectory, and the dynamic changes of the AGV flow (including flow density, flow rate, flow rate, flow direction, occupancy, etc.), making the automated terminal The road network traffic status and space-time interference have new complexities.
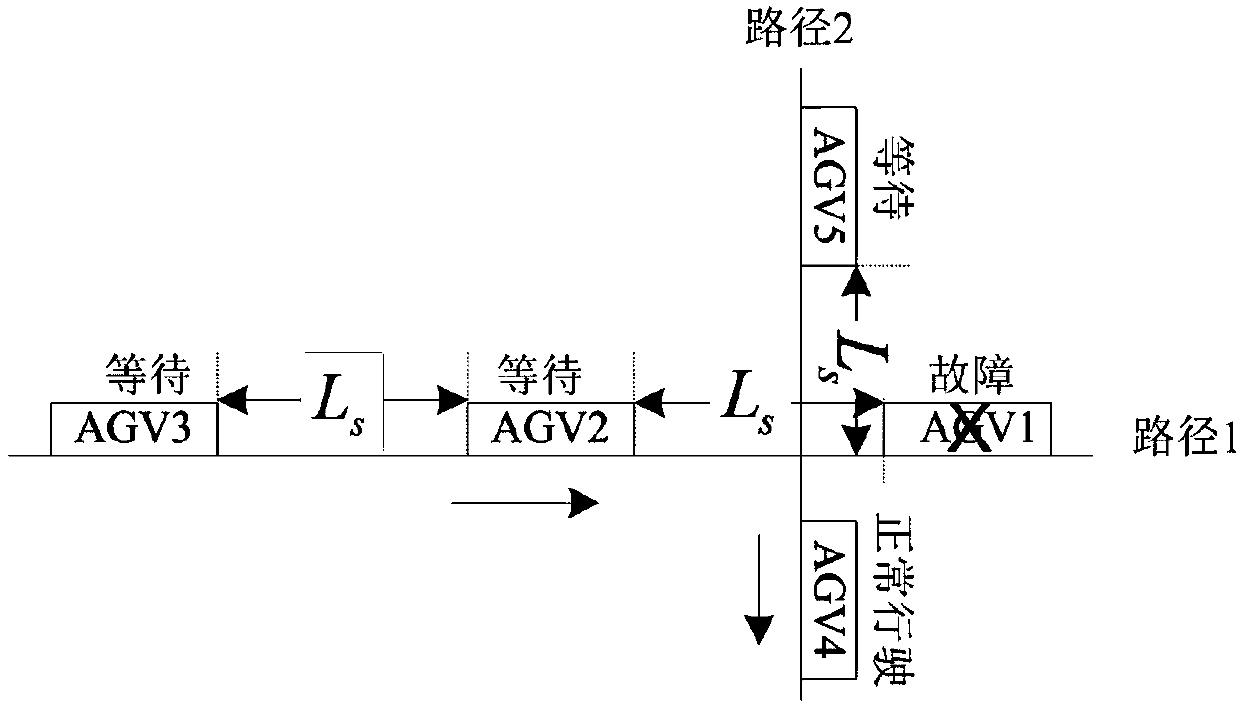
[0074] Accurately revealing the evolution law of AGV flow, establishing an accurate spatio-temporal interference interaction model, and performing effective and reliable interference degree detection are the premise and basis for AGV spatio-temporal interference avoidance.
[0075] The invention provides a method for detecting and avoiding spatio-temporal interference of AGV flow in a time-varying environment, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More