

Method for evaluating motion similarity between robotic mouse and laboratory mouse
An evaluation method and similarity technology, applied in the field of bionic robots, can solve the problems of lack of and limit the optimal control strategy of the robot mouse, and achieve the effect of high similarity imitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and technical solutions, but it is not intended as a limitation of the present invention.
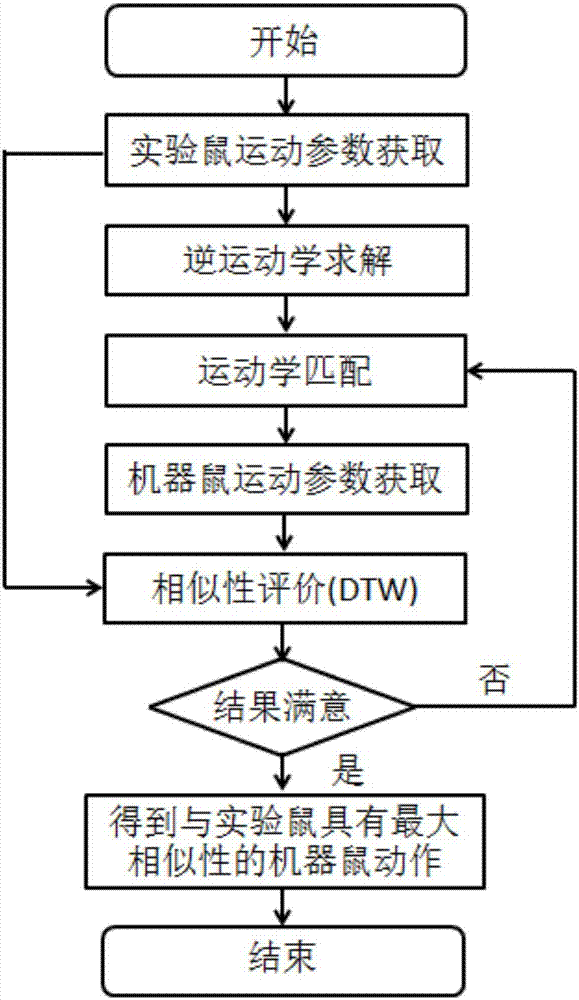
[0038] figure 1 Shown is a schematic diagram of the control flow of the robot mouse according to the motion similarity evaluation method of the present invention, which includes the following steps.
[0039] S10: capturing motion parameters of the experimental animal;
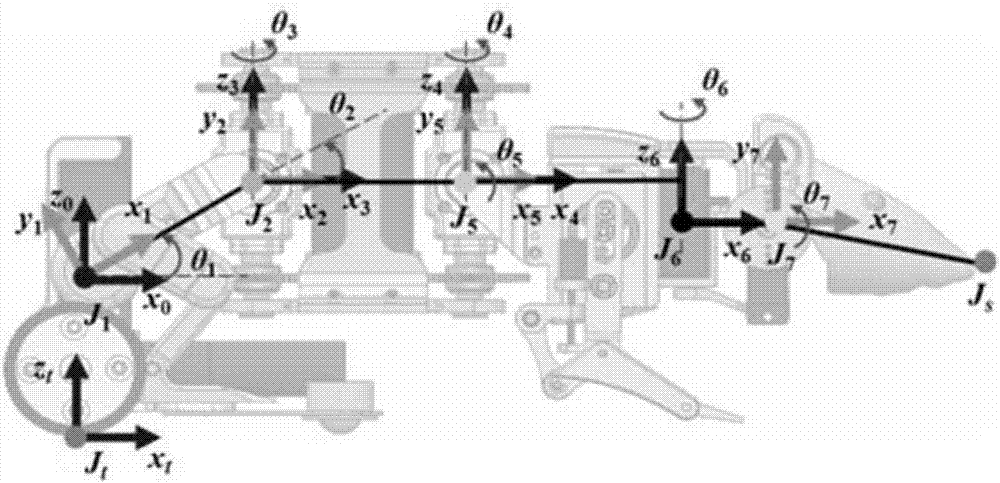
[0040] S20: Carry out inverse kinematics solution to obtain the joint angle and posture of the bionic robot;
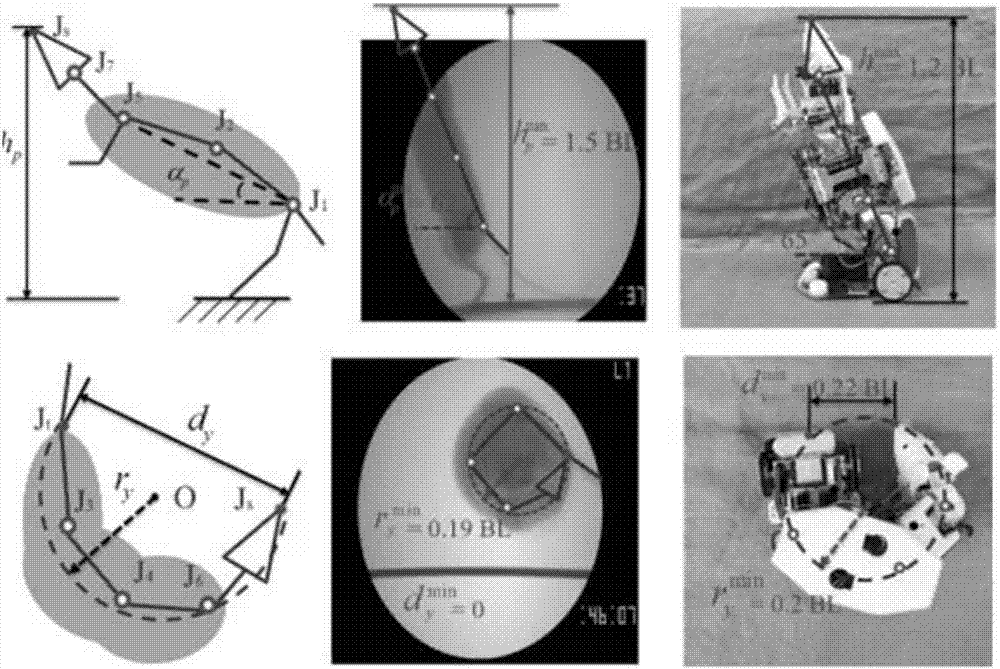
[0041] S30: kinematically matching the experimental animal and the bionic robot;
[0042] S40: acquiring motion parameters of the bionic robot;
[0043] S50: Using a dynamic time warping (DTW) method to perform motion similarity evaluation;
[0044] S60: judging whether the motion similarity between the experimental animal and the bionic robot meets the requirements, if not, then go to step S30;
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More