

Excavator precision work control method, system and excavator
A fine work and control method technology, applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problems of increased energy consumption and emissions, long operating hours of equipment, and difficult control, etc. problems, to achieve the effect of reducing labor costs, saving fuel consumption, and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Objects, advantages and features of the present invention will be illustrated and explained by the following non-limiting description of preferred embodiments. These embodiments are only typical examples of applying the technical solutions of the present invention, and all technical solutions formed by adopting equivalent replacements or equivalent transformations fall within the protection scope of the present invention.
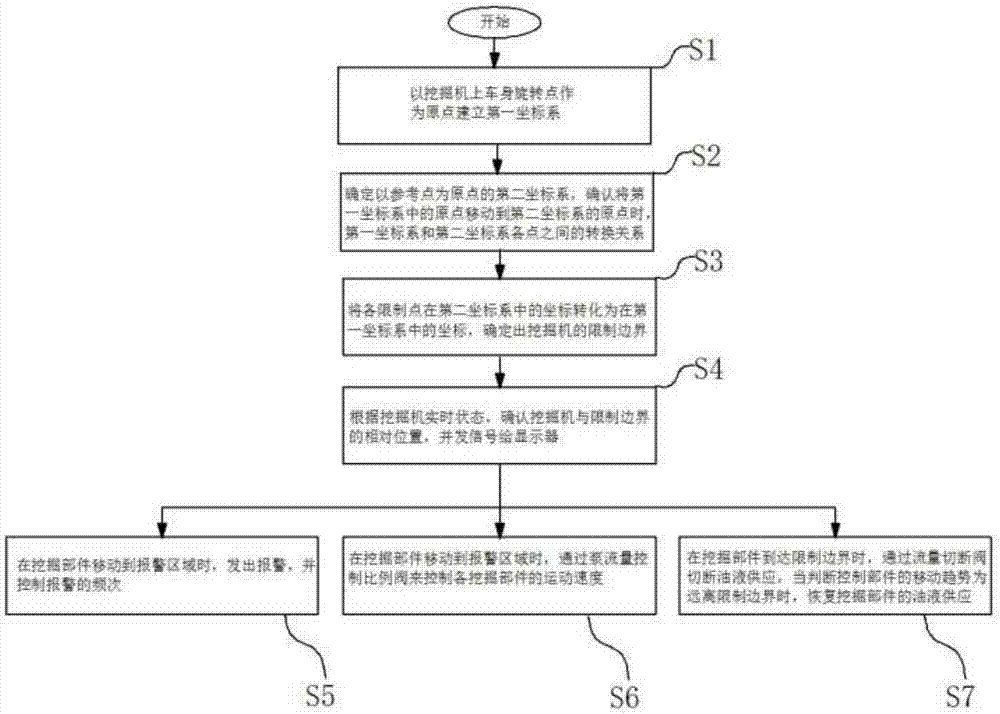
[0039] The invention discloses a fine work control method for excavators, as shown in the attached figure 1 shown, including the following steps:
[0040] S1. The first coordinate system is established with the rotation point of the upper body of the excavator as the origin. For example, the rotation point of the upper body of the excavator is the origin, and the front and rear directions of the excavator are defined as the X axis, the left and right directions of the excavator as the Y axis, and the up and down directions of the excavator as Z axis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More