

Virtual control point obtaining method based on laser range finding and object space matching
A technology of virtual control points and laser ranging, which is applied in measuring devices, radio wave measuring systems, image data processing, etc. It can solve problems such as point cloud coordinate errors, DEM accuracy that cannot meet requirements, and point cloud strips that cannot be well matched. , to achieve the effect of improving the elevation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
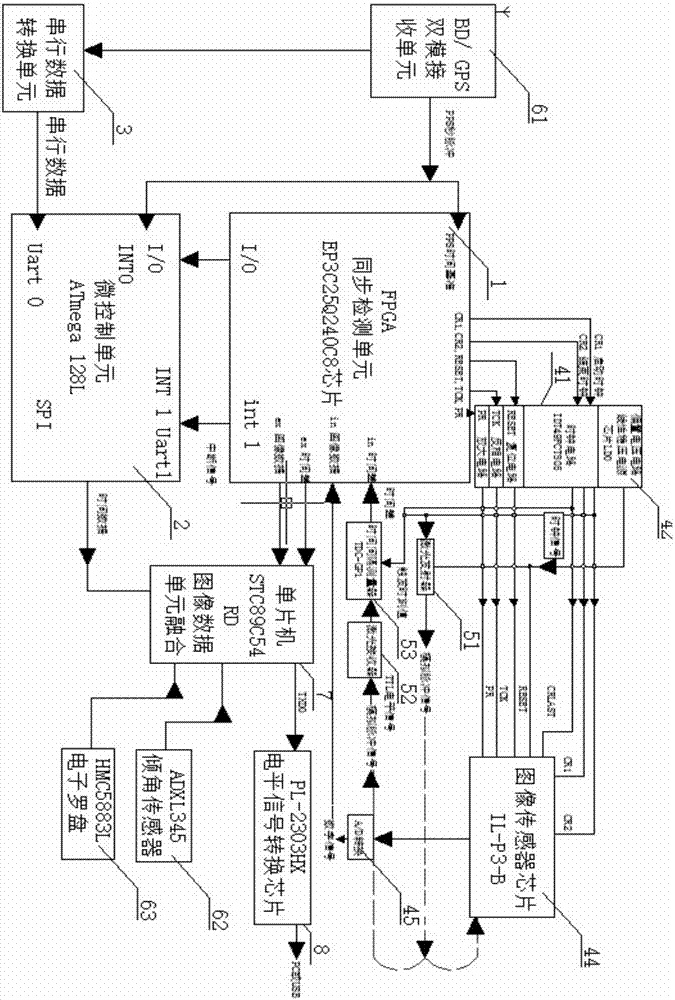
[0036] The present invention provides a measurement device based on laser distance measurement and object space matching virtual control point, which consists of a storage battery 9 for power supply, a synchronous detection unit 1, a micro control unit 2, a serial data conversion unit 3, an aerial camera assembly 4, Composed of laser ranging component 5, POS data component 6, image data fusion unit 7, level data conversion chip 8,
[0037] Synchronization detection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More