

Mooring rope buoy hooking aerial low-speed unmanned aerial vehicle non-destructive recycling system and method
A recycling system and drone technology, applied in aircraft parts, transportation and packaging, etc., can solve problems such as poor adaptability, and achieve the effect of large recycling range, improved adaptability, and improved working time and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
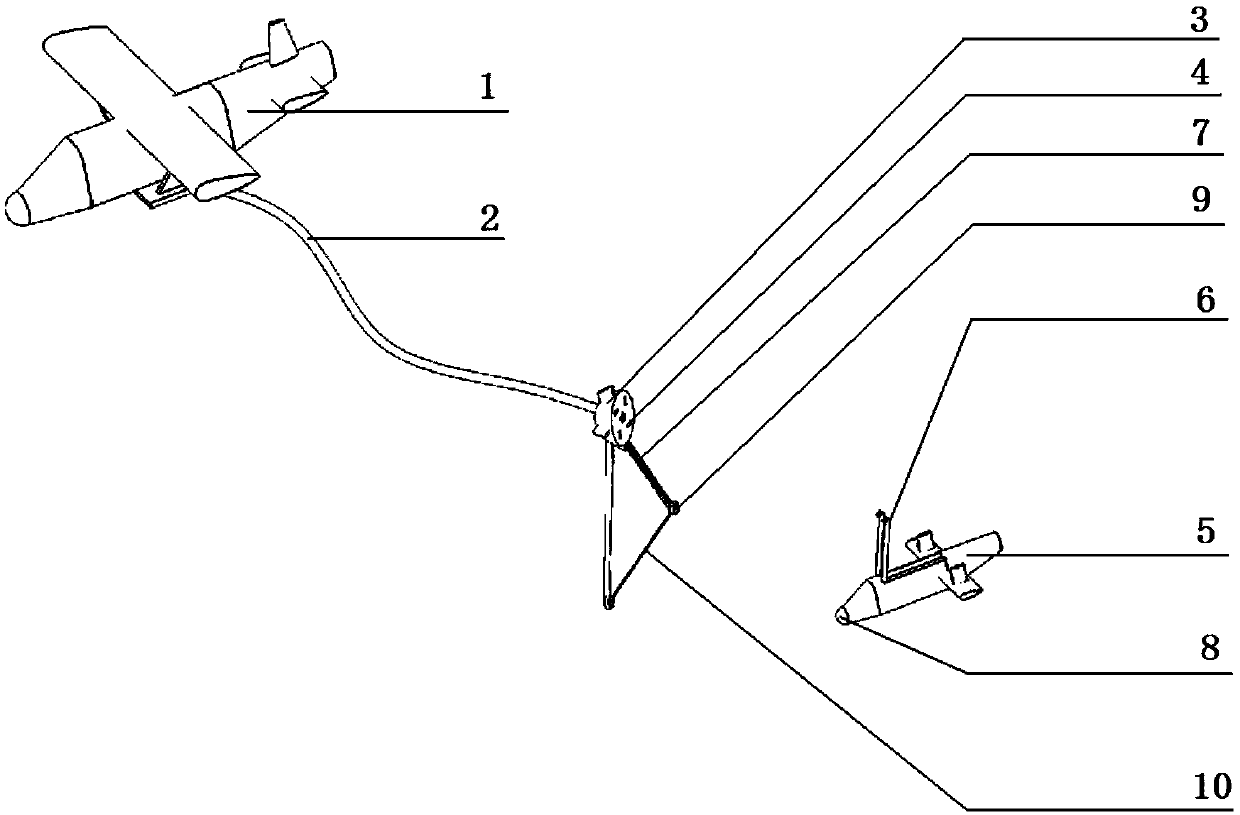
[0016] Specific implementation mode one: refer to figure 1 Specifically explain this embodiment, a cable buoy hook-type aerial low-speed unmanned aerial vehicle non-destructive recovery system described in this embodiment, including: carrier aircraft 1, cable 2, buoy 3, hooking device 6 and capture device 7;
[0017] One end of the cable 2 is fixed inside the carrier aircraft 1, the buoy 3 is fixedly connected to the other end of the cable 2, the buoy 3 is fixed on the capture device 7, and the buoy 3 has a built-in navigation system 4, which can obtain the movement track of the buoy 3 And send the trajectory signal to the low-speed UAV 5,
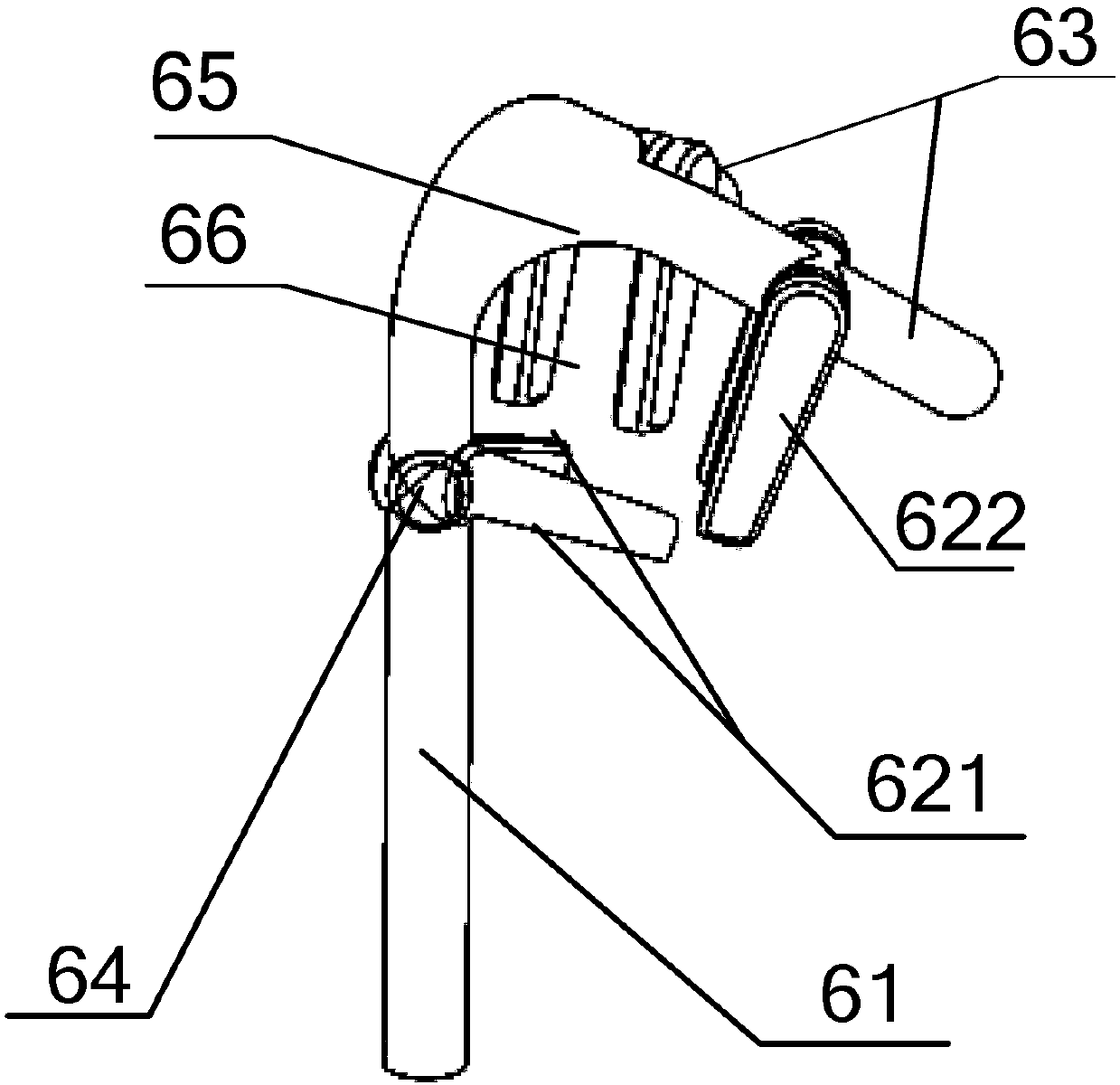
[0018] The hooking device 6 is fixed on the low-speed UAV 5, and the low-speed UAV 5 can be articulated with the capture device 7 through the hooking device 6 to realize the recovery of the low-speed UAV 5.
[0019] In this embodiment, the airfoil is placed on the buoy 3 so that it can generate sufficient lift and drag, so that it can fly...
specific Embodiment approach 2
[0021] Specific embodiment 2: This embodiment is a further description of the non-destructive recovery system for a cable buoy hook-type aerial low-speed unmanned aerial vehicle described in specific embodiment 1. In this embodiment, the capture device 7 is a tripod, One side of the bar of the tripod is the arresting rope 10, and the buoy 3 is fixed on the opposite corner of the arresting rope 10.
specific Embodiment approach 3
[0022] Specific embodiment three: This embodiment is a further description of the non-destructive recovery system for a cable buoy hook-type aerial low-speed unmanned aerial vehicle described in specific embodiment two. In this embodiment, two ends of the arresting rope 10 are respectively provided with a LED beacon9.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More