Self-adaptive stair-climbing control system and method
A control system and control method technology, applied in control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of restricting the range of activities and not enough to help disabled people adapt to various terrains, etc. Achieve the effect of improving intelligence, strong portability and stability, and improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
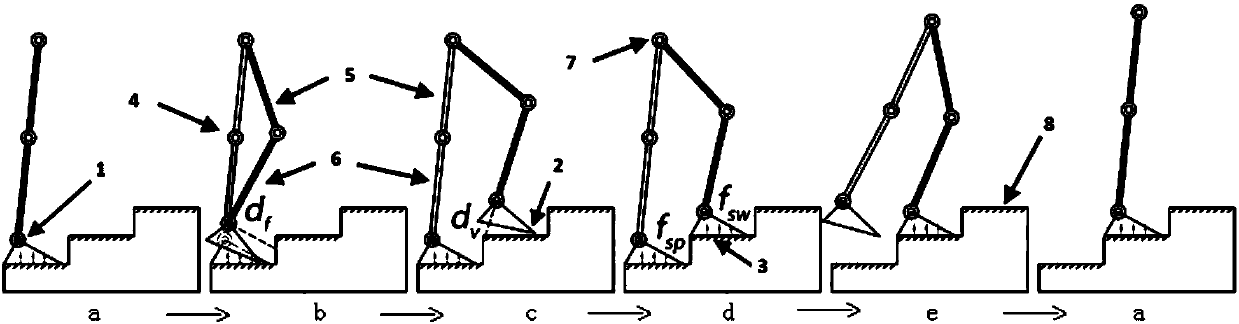
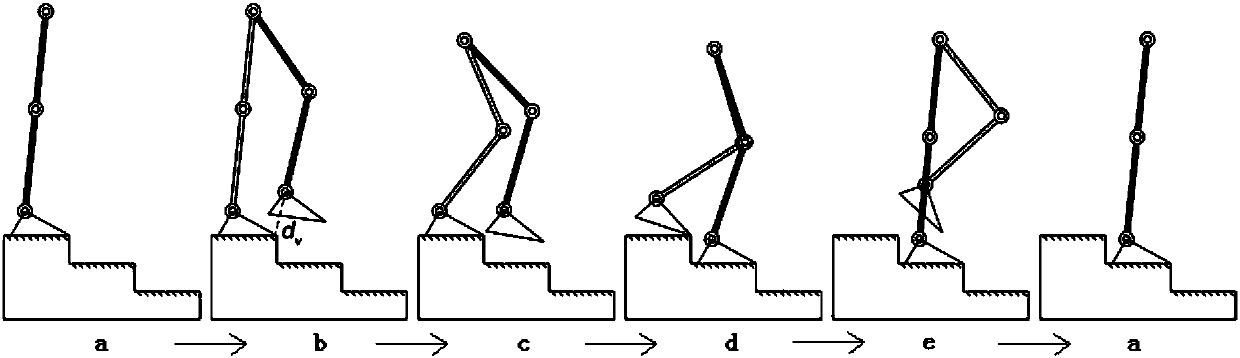
[0028] The present invention will be further described in detail according to specific embodiments below. Use distance sensors (distance sensors can be infrared, laser, camera, etc., which can directly or indirectly obtain the distance from obstacles through algorithms, etc., and the number of distance sensors that can be installed on each leg is greater than or equal to one), and the installation position can be each joint After determining the installation position of the sensor, the exoskeleton (biped) robot model is established according to the length of the connecting rod between the joints and the joint angle. Based on the forward kinematics of the robot, the forward and longitudinal measurements Calculate the distance and size information of the obstacle in front from the sensor measurement data. Using Motion Capture (motion capture) and other methods to collect and fit the trajectory of normal people going up and down stairs in advance, using DMP (Dynamic Movement Prim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More