

Robot autonomous localization and navigation based on image-text recognition and semantic meaning
A robot and graphic technology, applied in navigation, surveying and navigation, character and pattern recognition, etc., can solve the problems of robot position and track drift, cannot support autonomous navigation and navigation, etc., achieve high accuracy and promote human-machine communication , the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with embodiment.
[0055] The system designed by the invention is divided into an offline part and an online system.
[0056] Offline part:
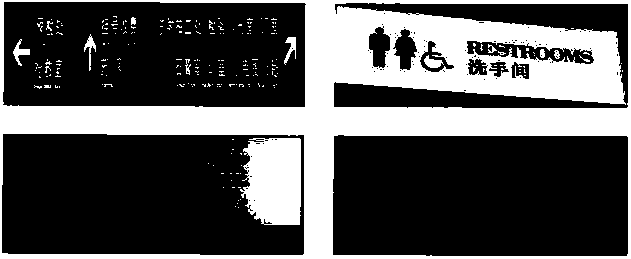
[0057] It is mainly to complete the collection of various signs, especially indoor direction signs and warning signs, which are manually labeled (labelled) and stored in the database. Through the machine learning scheme, the algorithm memorizes the graphics, image features and features of these signs. semantic information. it includes:
[0058] 1) Collection: It can be collected on the network or manually on-site
[0059] 2) Labeling: Manually label the attributes and semantics of the collected signs, such as the shape and meaning of the direction signs, signs of passage and signs of prohibition, etc.
[0060] 3) Training: through machine learning methods, the algorithm can obtain the knowledge of these signs (attributes, concepts, semantics, etc.)
[0061] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More