

Method for suppressing rotation speed fluctuation of PMSM based on iterative learning
An iterative learning control and iterative learning technology, which is applied in the field of motor control, can solve problems such as affecting the control accuracy of the speed control system and restricting the application of high-performance direct drive systems, and achieve the effect of realizing uncertainty and suppressing periodic pulsation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0048] This embodiment discloses a PMSM speed fluctuation suppression method based on iterative learning, comprising the following steps:
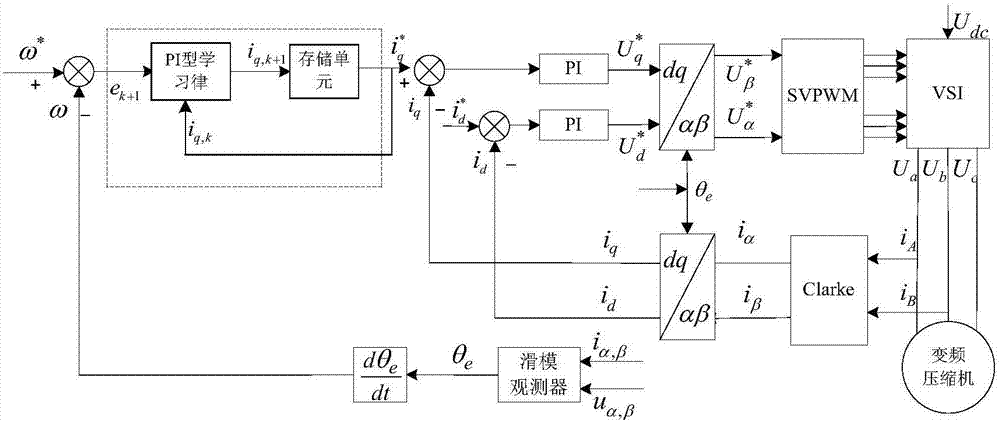
[0049] Step S1, such as figure 1 as shown, figure 1 Adopt the PMSM system structural diagram of PI type iterative learning control for the present embodiment, wherein in the dotted line frame is PI type iterative learning controller, and learning law is:
[0050] i q,k+1 (t)=(1-α)i q,k +G pc e k+1 (t)+G I ∫e k+1 (t) dt (1)
[0051] In the above formula, i q,k+1 is the q-axis current reference signal of the current cycle; i q,k is the shaft current reference signal of the previous cycle, which is the "learning experience"; e k+1 is the current cycle speed deviation signal, which is mainly used to compensate the loss of "learning experience" caused by the forgetting factor, G pc , G I Learning gain for closed loop. The above formula can be written in the form of Z domain as:
[0052]
[0053] The iterative learning process...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More