

Robot joint movement device
A technology of robot joints and motion devices, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as limited range of joint motion, difficult design and processing, and complex structures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
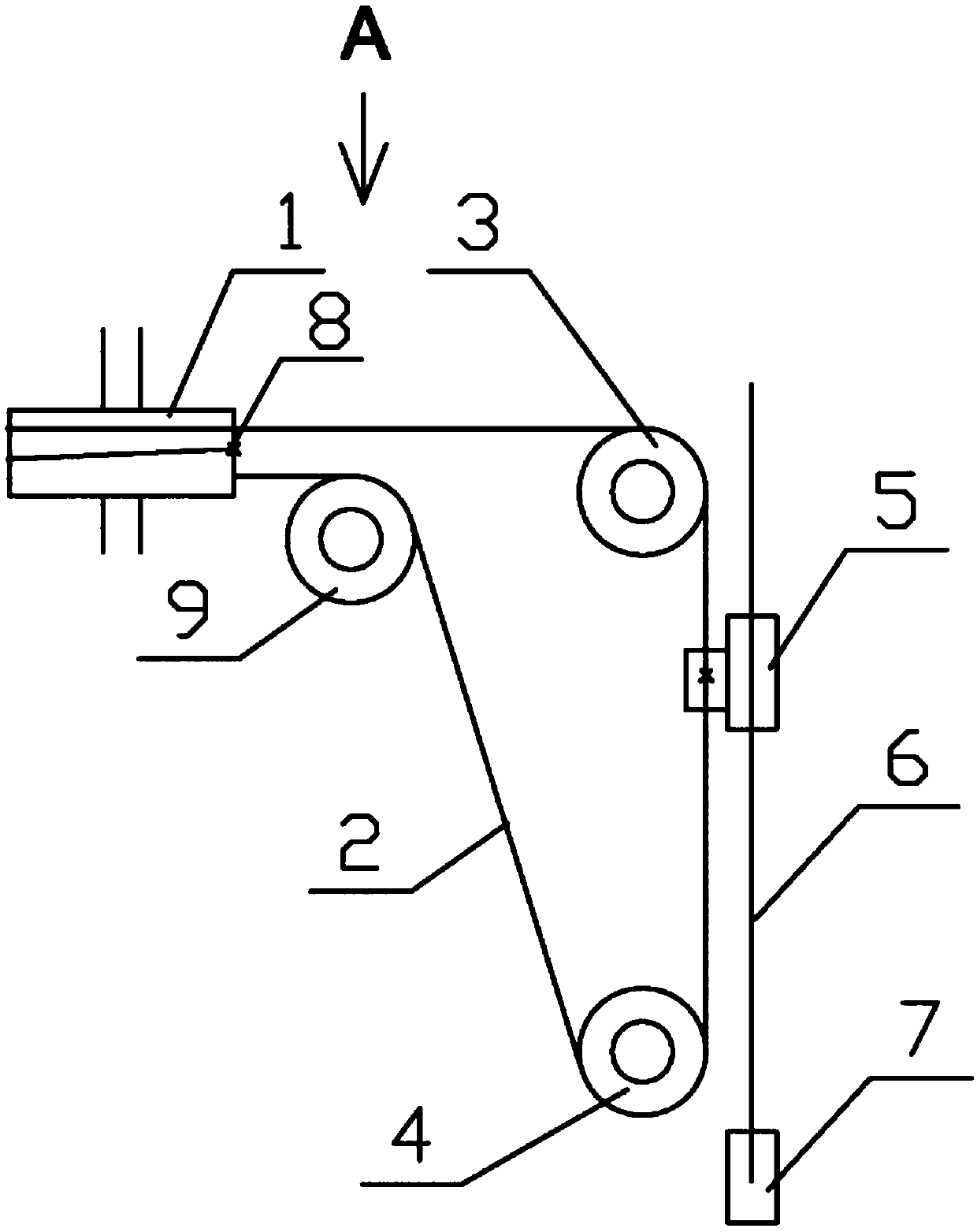
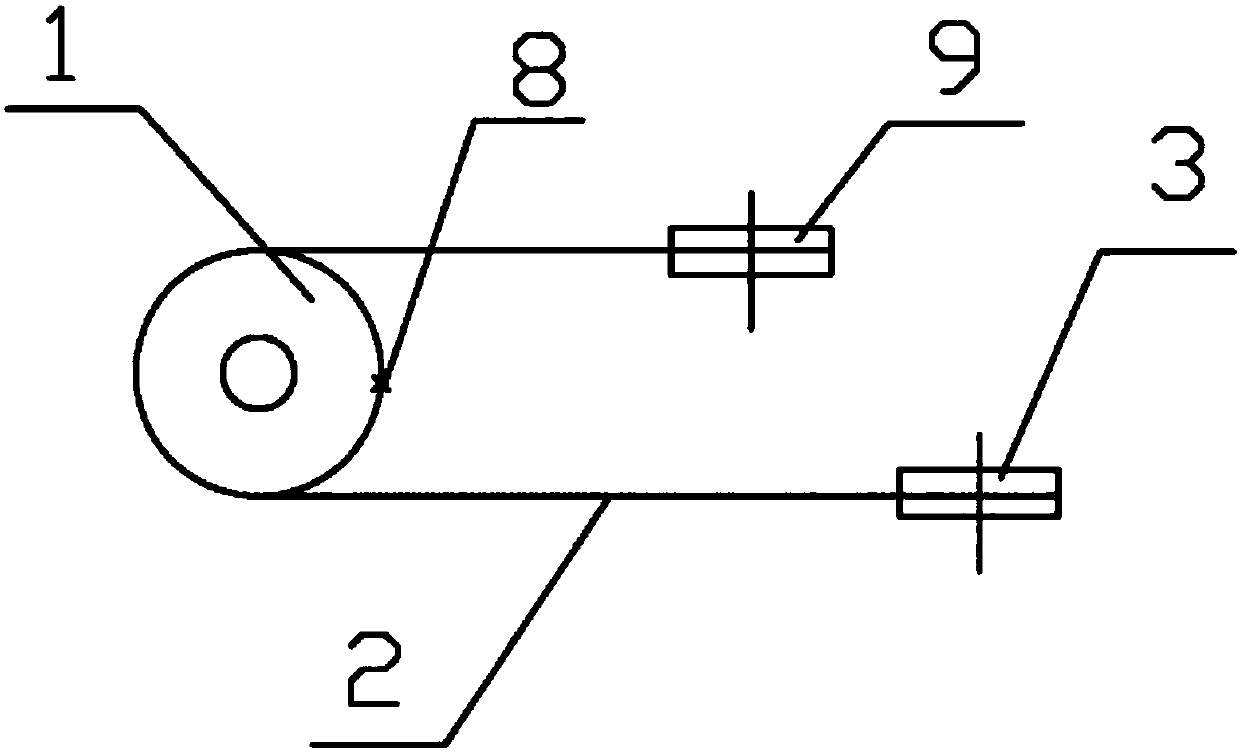
[0010] As shown in the drawings, the robot joint motion device of the present invention includes a balance wheel 1 connected to the joint body, and a flexible rope cover 2 is wound on the balance wheel 1, and the flexible rope cover 2 is also set on a plurality of The transition wheel 3, 4, 9 forms a circular transmission route; the transition wheel 3, 4, 9 and the balance wheel 1 are rotatable wheels, and the balance wheel is not parallel to the axis of the transition wheel, but is vertical or at a certain angle lean state. The flexible rope sheath 2 is tightly wound on the balance wheel 1, and said flexible rope sheath 2 is wound on the balance wheel 1 at least once, and the outer circumference of the balance wheel 1 is fixedly provided with a fixed clip that is clamped on the flexible rope sheath 2 8. Fix the flexible rope cover 2 on the balance wheel 1. A screw nut 5 is fixedly installed on the flexible rope sleeve 2, and the screw nut 5 is fitted on the lead screw 6 thro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More