

Method and device for detecting positions and posture on basis of auxiliary lines and computer readable storage medium
A detection method and auxiliary line technology, applied in the field of robot perception, can solve problems such as unreliable positioning means, detection means failure, multi-path interference, etc., to improve detection frequency and system reliability, strong detection accuracy and environmental adaptability, The effect of improving system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
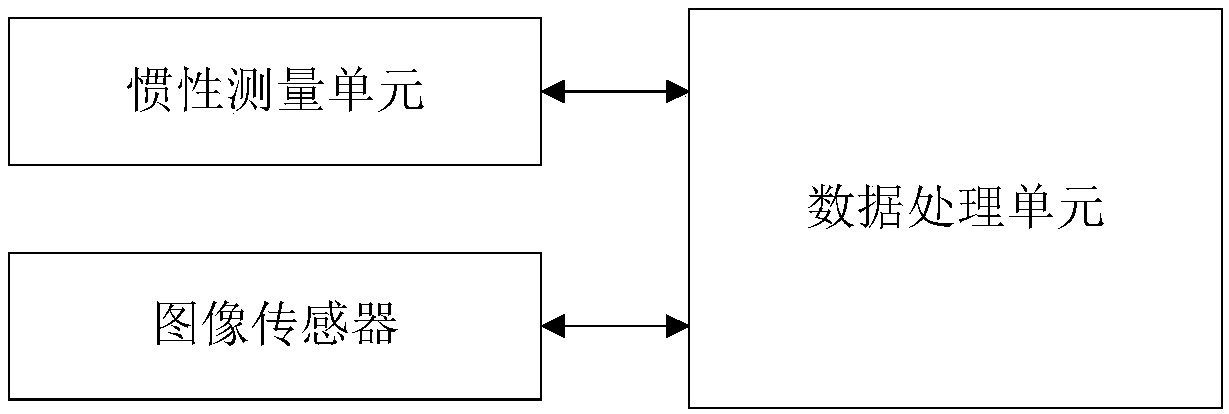
[0032] The present invention utilizes the combination of sensors such as an inertial measurement unit and a camera and an estimation algorithm to detect the pose of the robot in real time. Compared with the prior art, the present invention has the characteristics of low cost, high precision and high reliability, and provides a cost-effective detection method for obtaining pose information of various robots.
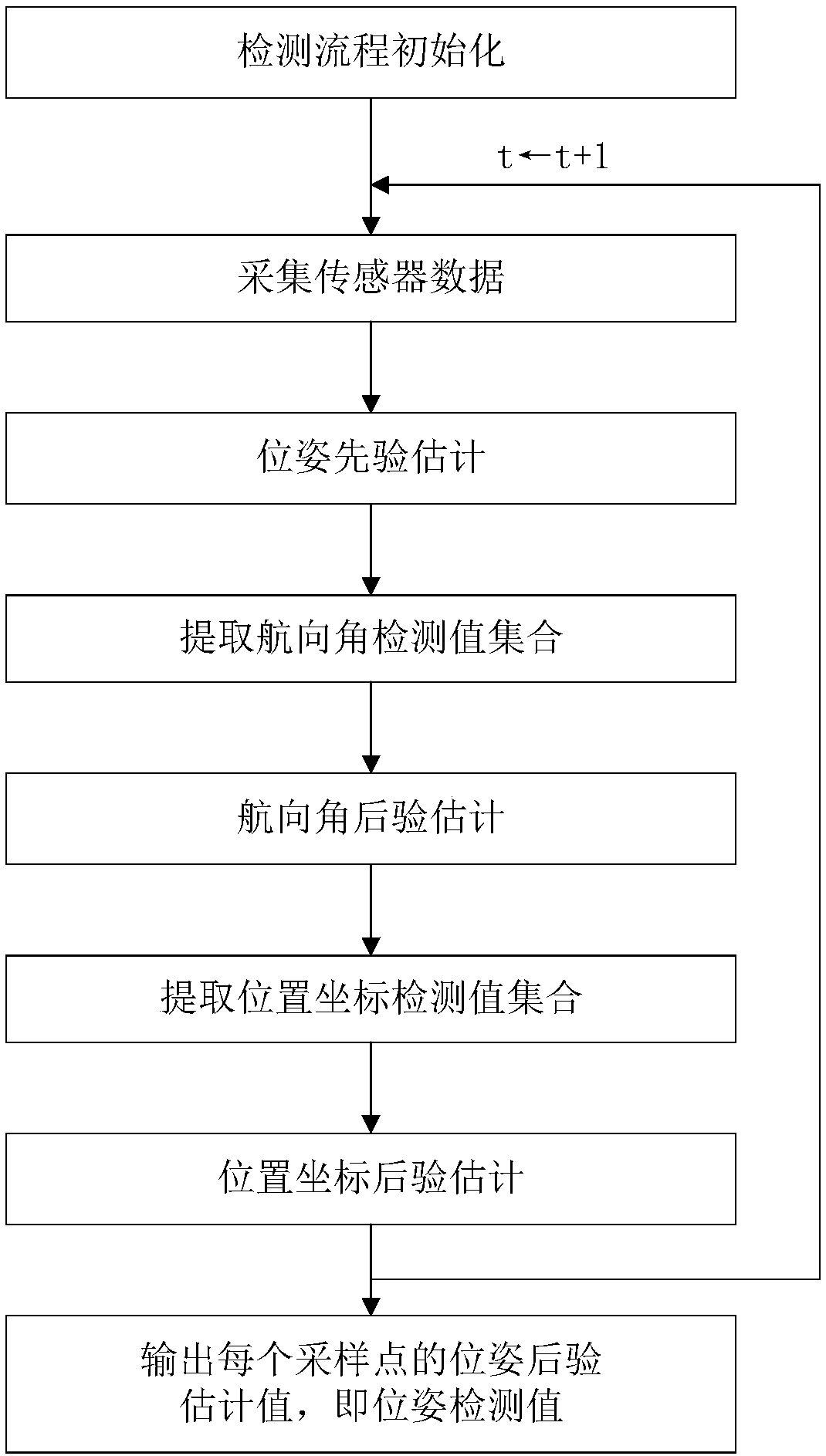
[0033] A pose detection method based on ceiling auxiliary lines of the present invention includes the following steps: detection process initialization, sensor data collection, pose prior estimation, extraction of heading angle detection value set, heading angle posterior estimation, and p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More