

A traction control method and system for a footed robot based on an improved artificial potential field
A technology of artificial potential field and traction control, applied in control/adjustment system, two-dimensional position/channel control, attitude control and other directions, can solve the problem that the robot cannot reach the end point, and achieve stable and reliable autonomous walking path and simple control method. , the effect of improving the efficiency of task execution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0097] The present invention provides a traction control method for a footed robot based on an improved artificial potential field, the flow chart of which is as follows: figure 1 As shown, the method includes the following steps:
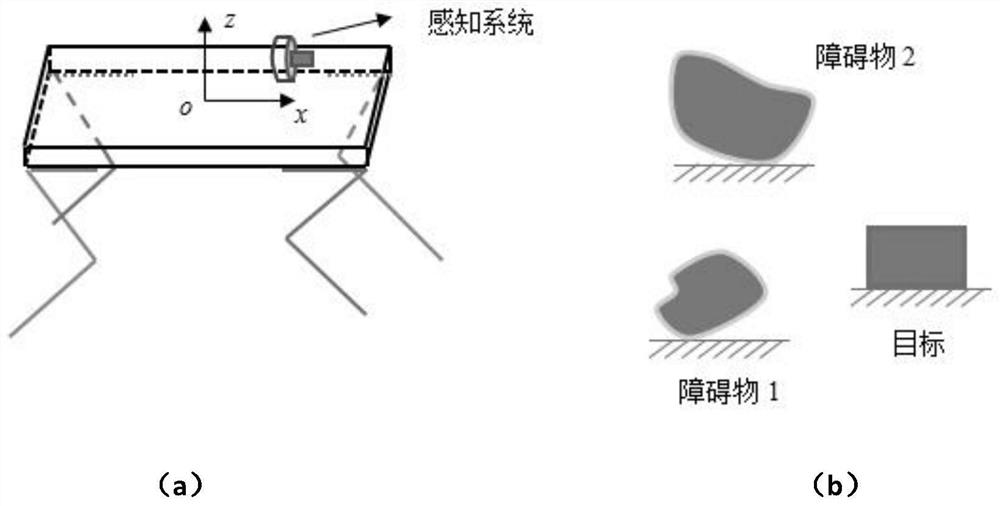
[0098] S1, extracting robot operating environment information;
[0099] S2, construct the gravitational potential energy field of the robot target;
[0100] S3, construct the repulsive potential energy field of the robot obstacle;
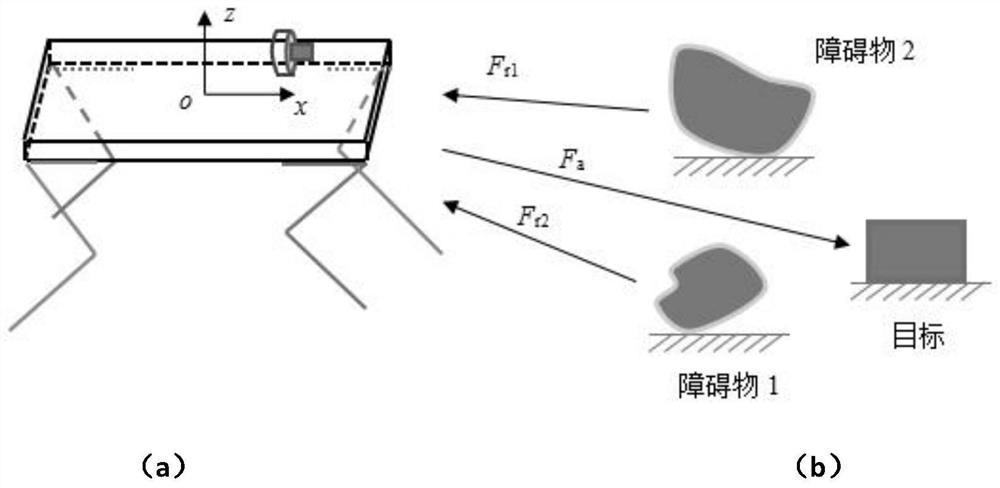
[0101] S4, establish target and obstacle virtual force;
[0102] S5, according to the virtual resultant force generated by the environment, design the longitudinal motion control signal of the fuselage;
[0103] S6, according to the virtual attraction and repulsion generated by the environment, design the control signal of the movement direction of the fuselage;
[0104] S7, design the fuselage pose controller according to the expected fuselage motion signal.
[0105] like figure 2 As shown, in S1, the robot work...
Embodiment 2
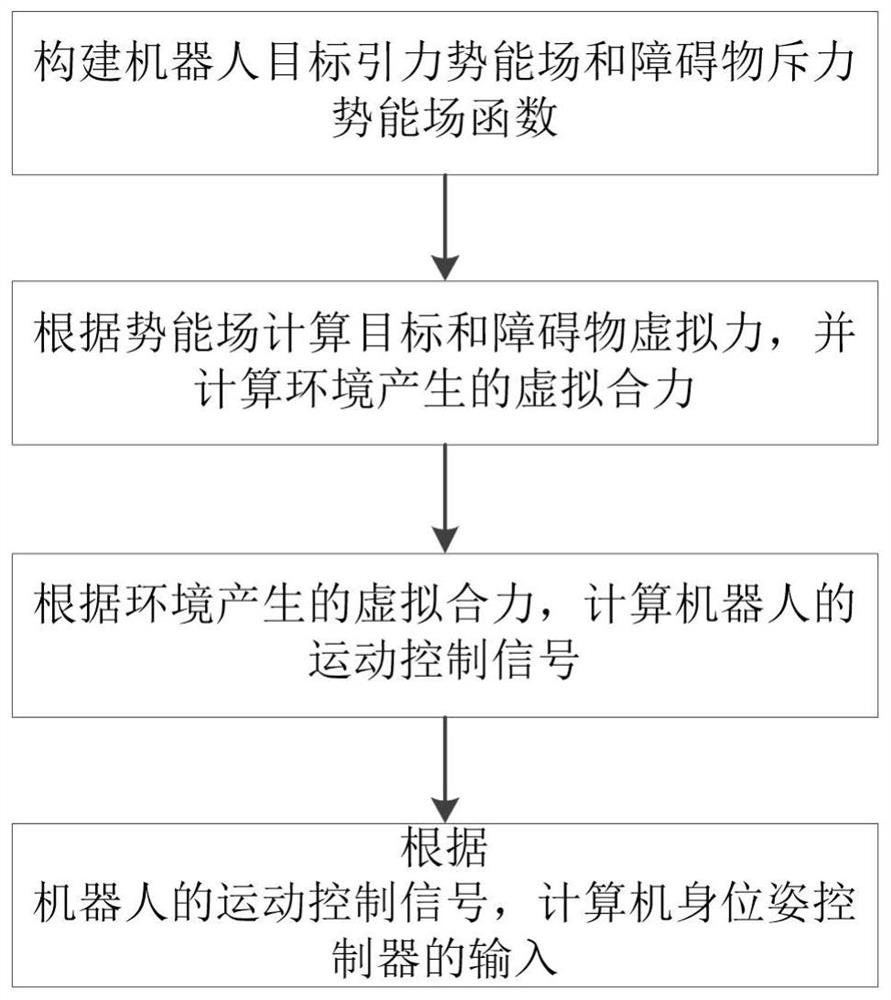
[0155] Based on the same inventive concept, the present invention also provides a traction control system for a footed robot based on an improved artificial potential field, the structural block diagram of which is as follows: Figure 5 shown, including:
[0156] The building module 201 is used to build the robot target gravitational potential energy field and the obstacle repulsion potential energy field function;
[0157] The first calculation module 202 is used to calculate the virtual force of the target and the obstacle according to the potential energy field, and calculate the virtual resultant force generated by the environment;
[0158] The second calculation module 203 is used to calculate the motion control signal of the robot according to the virtual resultant force generated by the environment;
[0159] The third calculation module 204 is used for the motion control signal of the root robot and the input of the computer posture controller.
[0160]The system also...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More