

Synchronous control mechanical arm
A synchronous control and manipulator technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of large occupied space, large component size, complex control, etc., to prolong the service life, reduce the size of components, and simplify the motor circuit. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to illustrate the technical scheme and technical purpose of the present invention, the present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
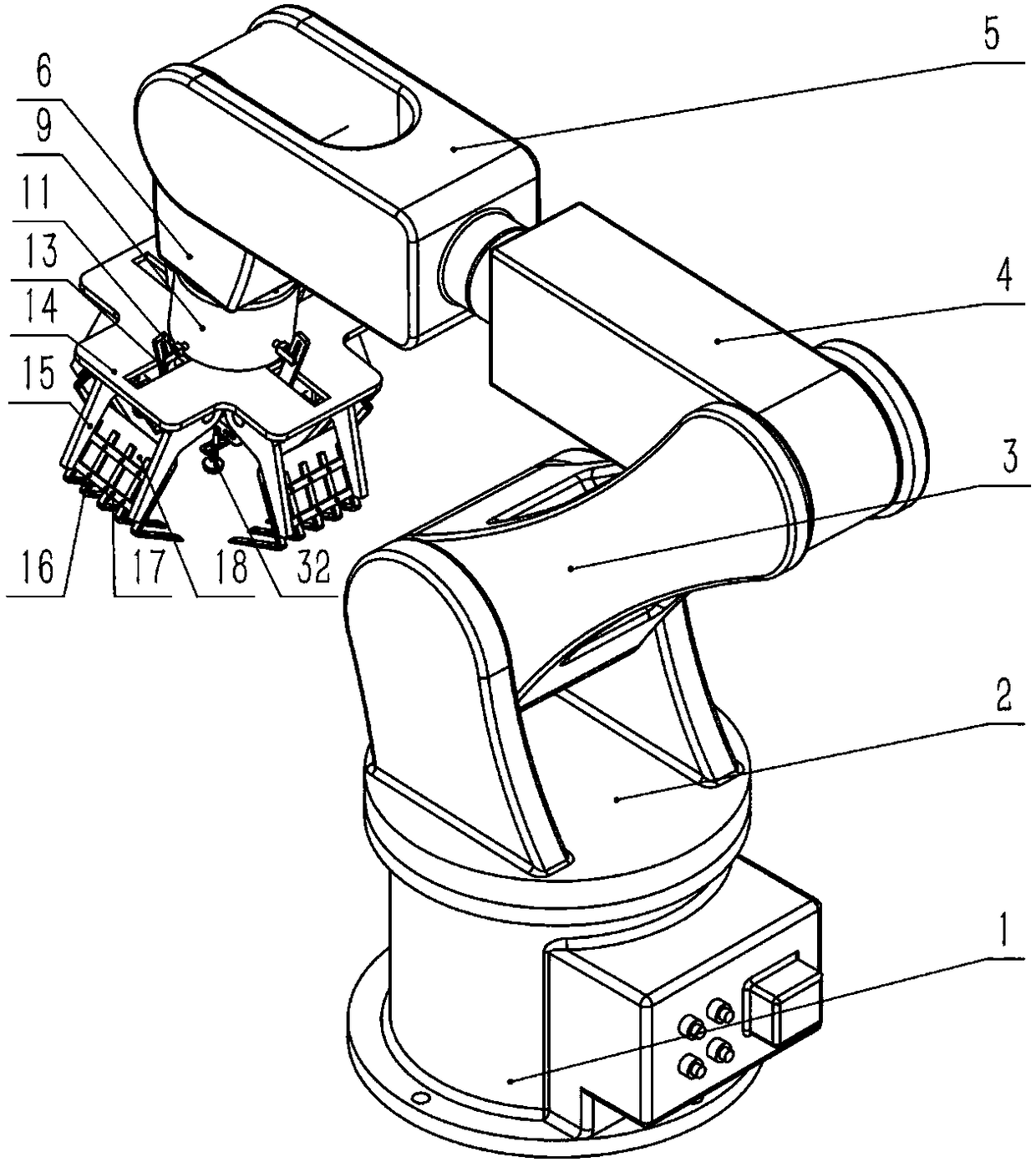
[0027] combine figure 1 , figure 2 and Figure 9 , a kind of synchronous control manipulator of the present invention, comprises base 1, rotating table 2, big arm 3, first small arm 4, second small arm 5, wrist 6, mechanical grasping device; Said mechanical grasping device passes screw fixed at the lower end of the wrist 6;
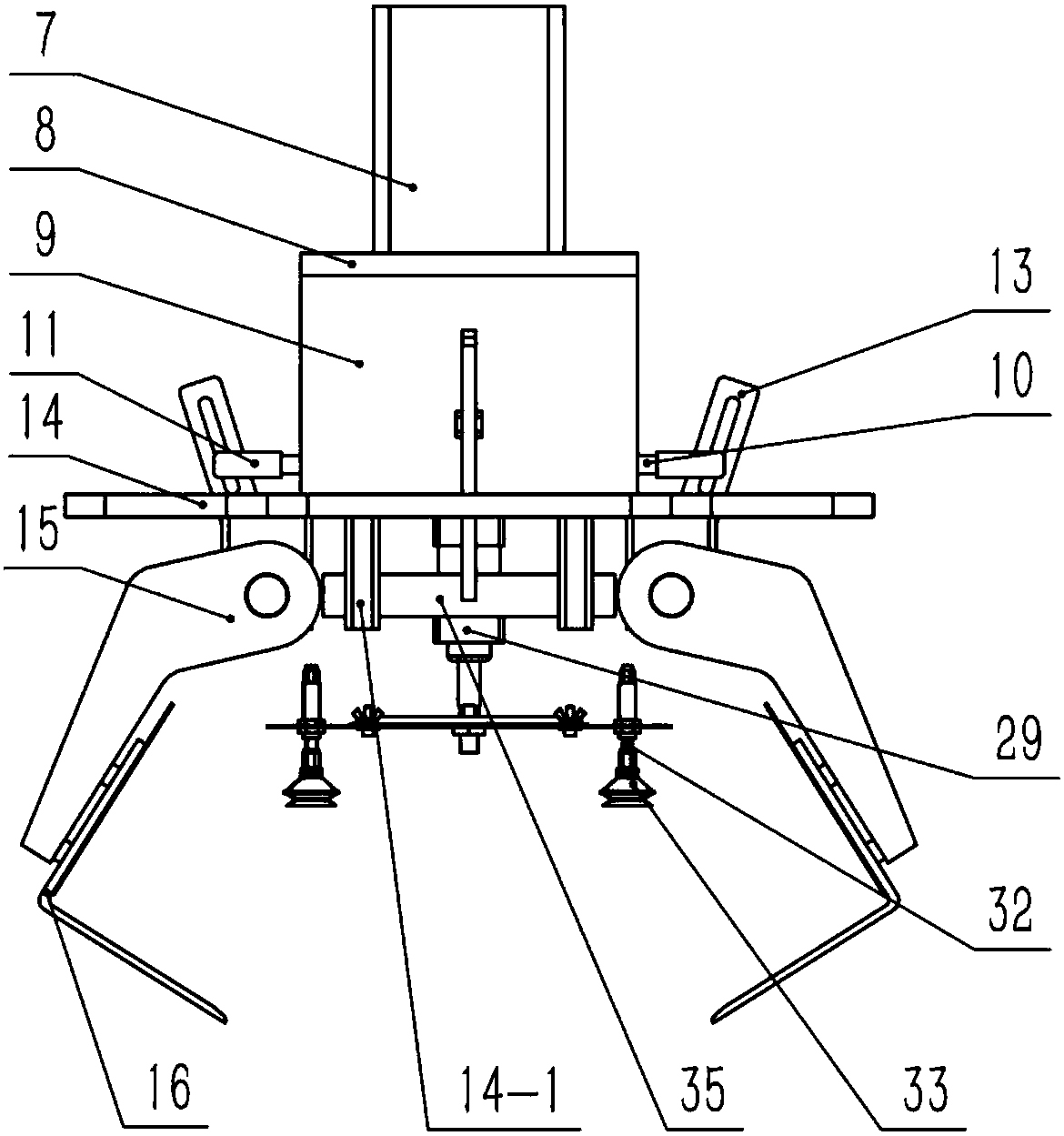
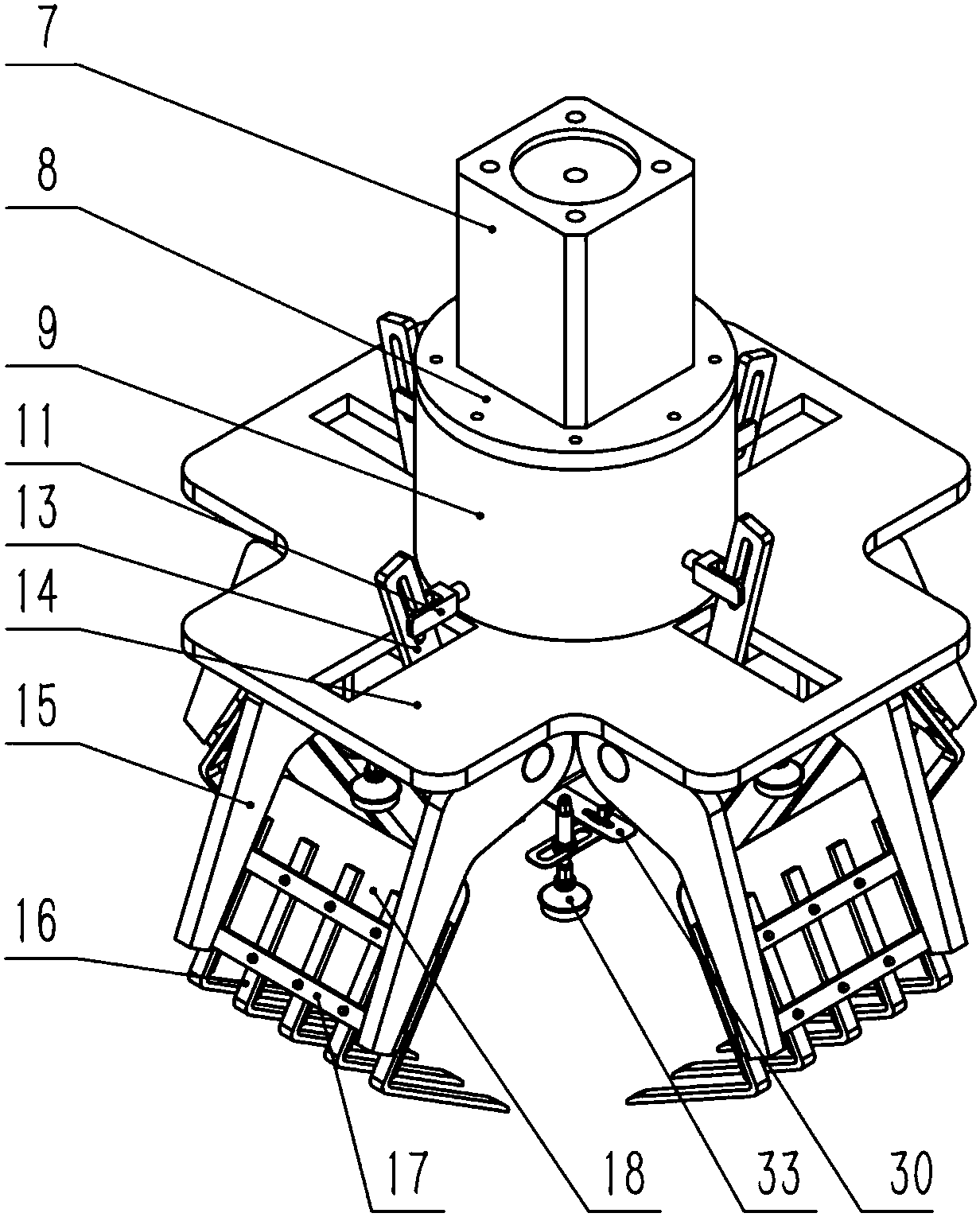
[0028] The mechanical grabbing device includes a drive mechanism, a linkage mechanism, and a mechanical claw; the drive mechanism is fixed on the lower end of the wrist 6; the drive mechanism is fixed on the upper end of the connecting platform 14 through a support frame 9; the drive mechanism and the linkage mechanism Connected, used to drive the swing of the linkage mechanism; the upper end of the connecting platform 14 is pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More