Infrared vision-based unmanned helicopter landing guiding and controlling method
An unmanned helicopter, guidance control technology, applied in attitude control, non-electric variable control, altitude or depth control, etc., can solve the problem that the safety, reliability, rapidity and autonomy of unmanned helicopter recovery cannot be taken into account at the same time. , to achieve the effect of not easy external interference, good real-time performance and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0032] This invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, components are exaggerated for clarity.
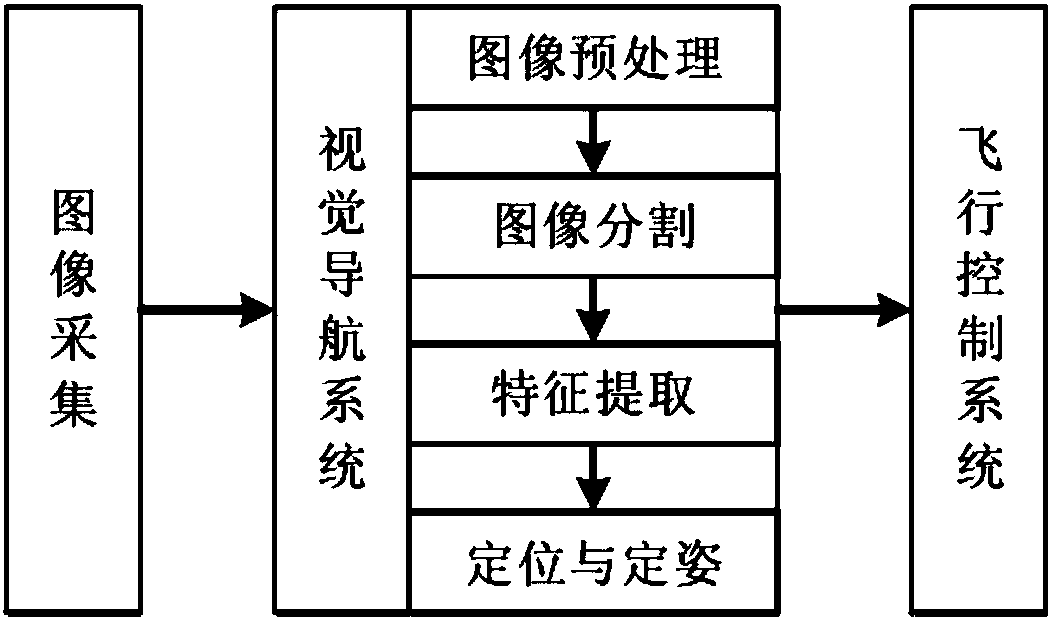
[0033] The invention discloses an infrared vision-based unmanned helicopter landing guidance control method. The software of the vision guidance system is installed in a computer, including an image processing system and an image calculation system. The former includes three parts: image preprocessing, image segmentation, and feature extraction. The image or video obtained from the visual sensor is easily affected by noise or background, and image preprocessing is often required first,...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com