

UWB based accurate positioning and spraying control method of agricultural plant protection unmanned aerial vehicle (UAV)
A plant protection UAV and precise positioning technology, applied in the field of UWB-based agricultural plant protection UAV precise positioning and spraying control, can solve the problems of data confusion, shortage of pilots, and potential safety hazards, so as to reduce missed spraying and improve Accuracy, level-boosting effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be further described in detail below in conjunction with specific embodiments.
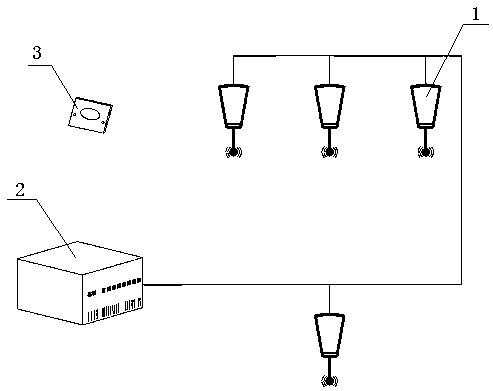
[0030] like Figure 1 to Figure 3 A UWB-based system for precise positioning and spraying control of agricultural plant protection drones is shown, including a positioning anchor point 1, a plant protection drone carrying a positioning tag 3, and a ground navigation station 2.
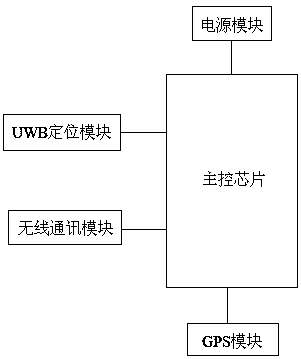
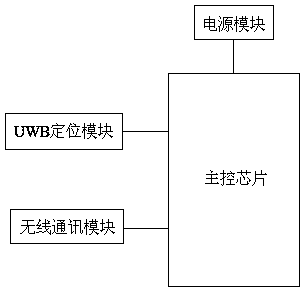
[0031] The positioning anchor point 1 adopts multiple (at least three, for three-dimensional positioning) and is distributed in every corner of the farmland. The positioning anchor point 1 includes a main control chip and a UWB positioning module connected to the main control chip, a wireless A communication module, a GPS module and a power module for determining the position of the anchor point.
[0032] The ground navigation station 2, as the system center, receives the position coordinates or time information sent by the positioning tag 3, and transmits the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More