

Pressure-controllable industrial robot grinding and polishing system and grinding and polishing method
A technology of industrial robots and six-axis robots, applied in the field of grinding and polishing, can solve problems such as unfavorable high efficiency, high-quality production, excessive grinding, wear, etc., to improve production efficiency and product quality, and improve the accuracy of movement , Improve the effect of grinding process quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
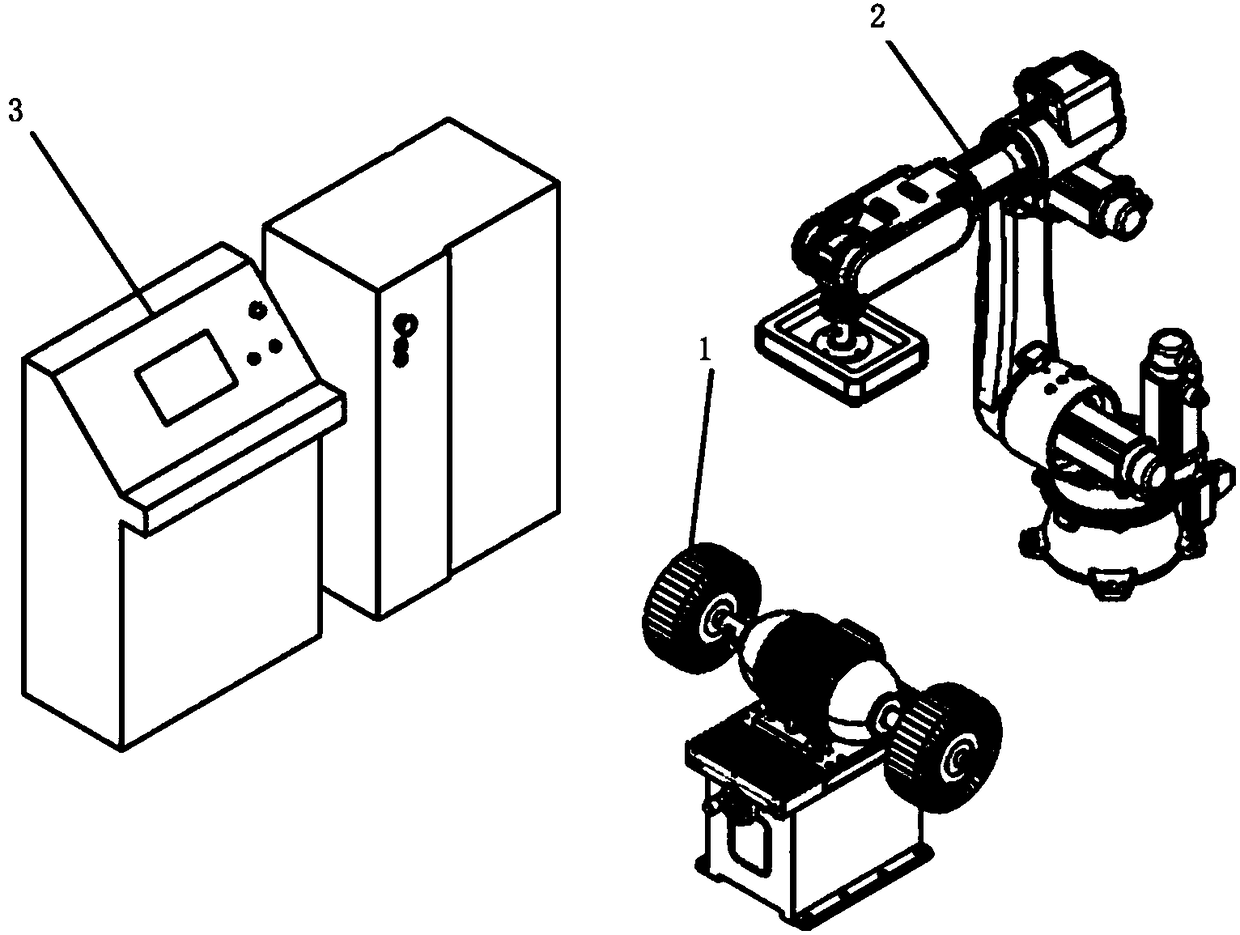
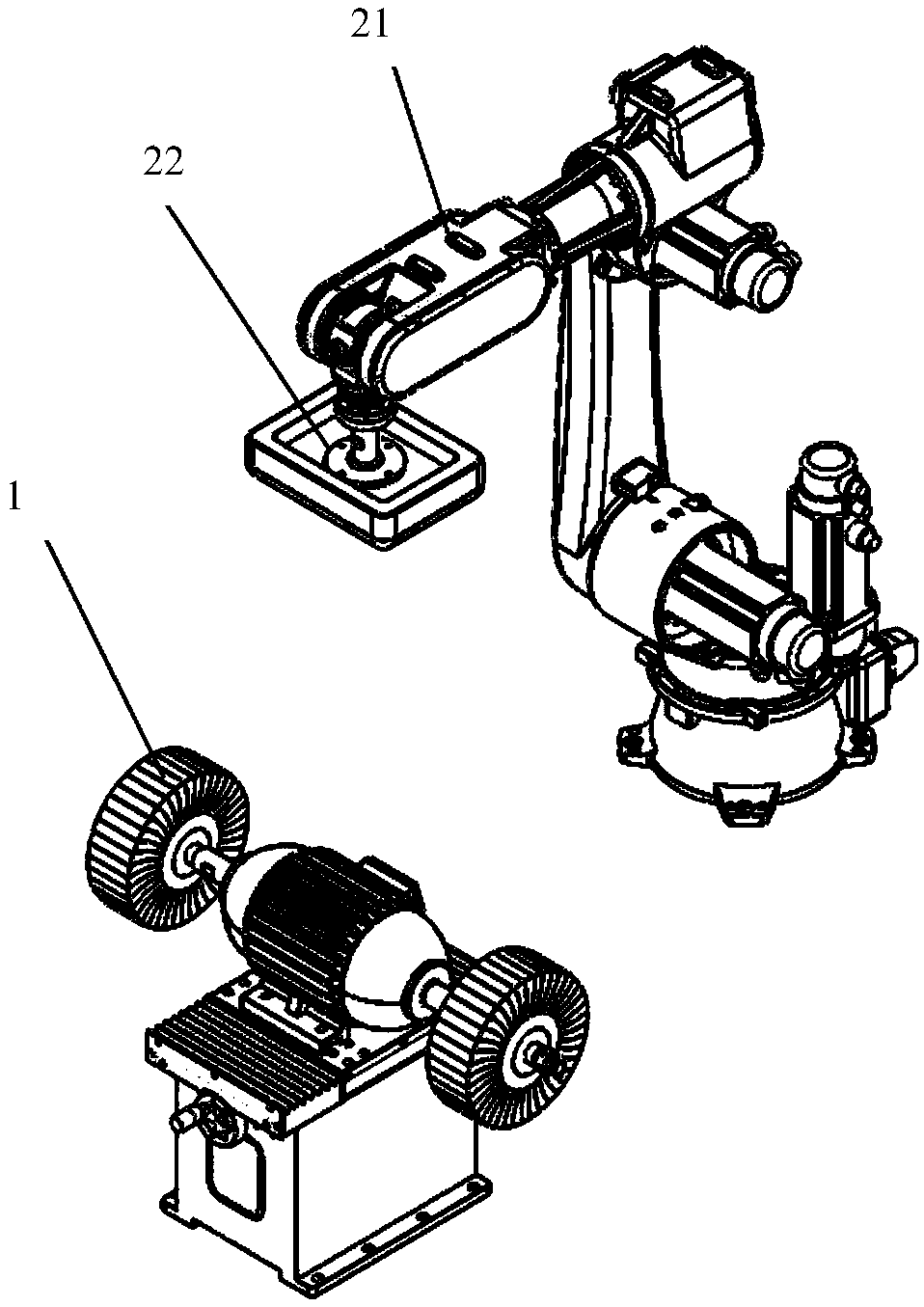
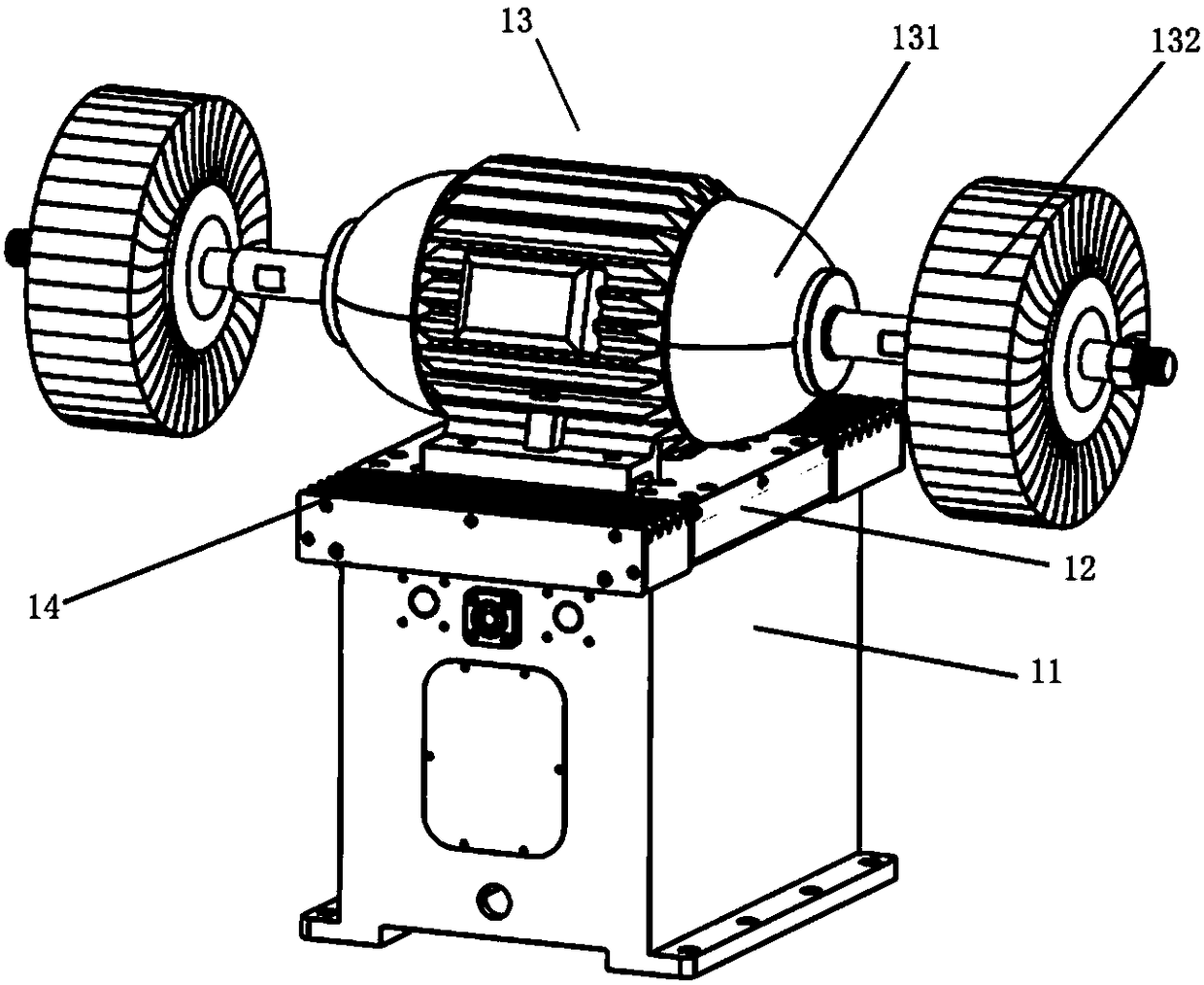
[0038] Such as Figure 1 to Figure 5 As shown, this embodiment provides a pressure-controllable industrial robot grinding and polishing system, including a polishing device 1, a feeding device 2 and a controller 3. The feeding device 2 includes a six-axis robot 21 and a terminal connected to the six-axis robot 21 , Pick-and-place tool 22 for picking and placing workpieces; six-axis robot 21 and pick-and-place tool 22 are respectively connected to the controller 3 in signal; the polishing device 1 includes a fixed base 11, a mounting base 12, and a polishing mechanism arranged on the mounting base 12 13 and the sliding rail 18 set on the fixed base 11, as well as the position adjustment mechanism and the cylinder 15; the push rod of the cylinder 15 is connected to the mounting base 12, and the mounting base 12 and the sliding rail 18 are slidably connected to realize the cylinder The push rod of 15 pushes the mounting seat 12 to move along the length of the slide rail 18 to driv...
Embodiment 2
[0047] Such as Image 6 As shown, this embodiment provides an industrial robot grinding and polishing method, which includes the following steps:
[0048] S1, the six-axis robot drives the workpiece to the grinding position;
[0049] S2: Preliminarily adjust the position of the cylinder through the position adjustment mechanism, so that the polishing mechanism connected to the cylinder is adjusted in position so that the polishing mechanism is in contact with the polishing surface of the workpiece;
[0050] S3, performing grinding treatment; during the grinding process, the controller controls the output air pressure of the cylinder to control the grinding pressure between the polishing mechanism and the workpiece so that the grinding pressure between the polishing mechanism and the workpiece is constant;
[0051] S4, the six-axis robot drives the workpiece to move to make contact between the next grinding surface of the workpiece and the polishing mechanism, and skip to step S3 to per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More