Method and device for determining target lane
A target lane and determination method technology, applied in the field of automatic driving, can solve the problem of high input cost and achieve the effect of cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] According to an embodiment of the present invention, a method embodiment of a method for determining a target lane is provided.
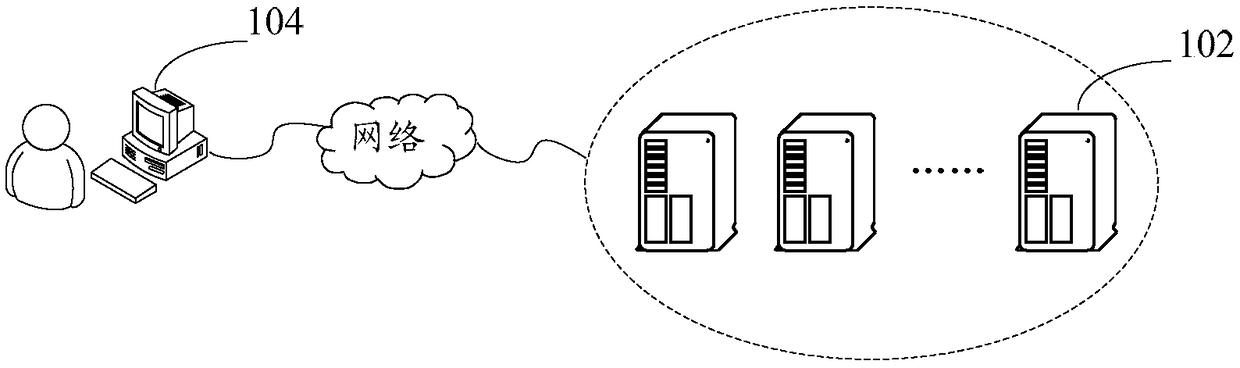
[0036] Optionally, in this embodiment, the above method can be applied to figure 1 In the hardware environment shown by the server 102 and the terminal 104. Such as figure 1 As shown, the server 102 is connected to the terminal 104 through a network. The above-mentioned network includes but is not limited to: a wide area network, a metropolitan area network, or a local area network. The terminal 104 is not limited to a PC, a mobile phone, a tablet computer, and the like. The method in the embodiment of the present invention may be executed by the server 102, may also be executed by the terminal 104, or may be executed jointly by the server 102 and the terminal 104. Wherein, the terminal 104 executing the method of the embodiment of the present invention may also be executed by a client installed on it.
[0037] The above-mentioned terminal is a v...
Embodiment 2
[0088] According to an embodiment of the present invention, a device for determining a target lane for implementing the method for determining a target lane is also provided. Figure 7 Is a schematic diagram of an optional device for determining a target lane according to an embodiment of the present invention, such as Figure 7 As shown, the device may include: an acquisition unit 72, an identification unit 74, and a first determination unit 76.
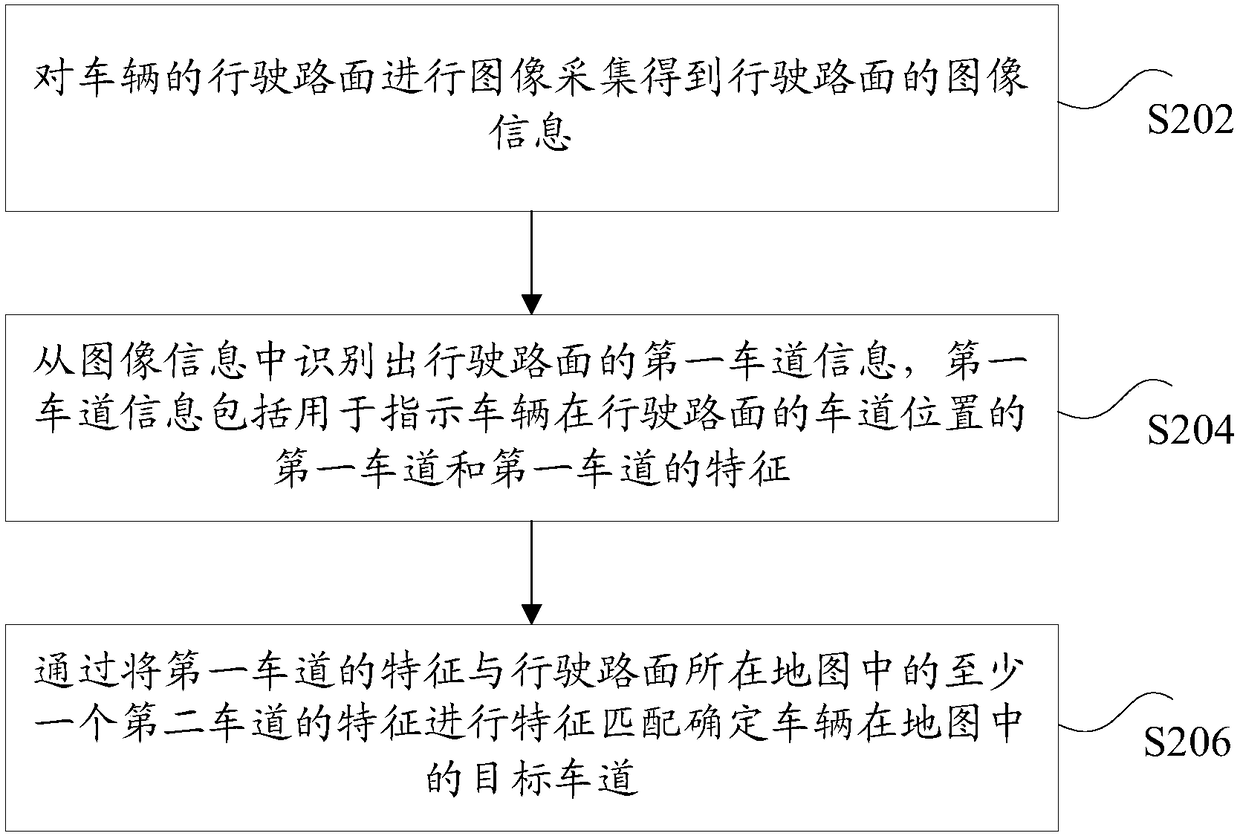
[0089] The collection unit 72 is configured to perform image collection on the driving road of the vehicle to obtain image information of the driving road;
[0090] The recognition unit 74 is configured to recognize the first lane information of the driving road surface from the image information, where the first lane information includes the first lane and the first lane characteristics used to indicate the lane position of the vehicle on the driving road surface;
[0091] The first determining unit 76 is configured to determine the target...
Embodiment 3
[0115] According to the embodiment of the present invention, there is also provided a server or terminal for implementing the method for determining the target lane described above.
[0116] Picture 9 Is a structural block diagram of a terminal according to an embodiment of the present invention, such as Picture 9 As shown, the terminal may include: one or more (only one shown in the figure) processor 901, memory 903, and transmission device 905 (such as the transmission device in the foregoing embodiment), such as Picture 9 As shown, the terminal may also include an input and output device 907.
[0117] Among them, the memory 903 can be used to store software programs and modules, such as program instructions / modules corresponding to the methods and devices in the embodiments of the present invention. The processor 901 executes various functions by running the software programs and modules stored in the memory 903. Application and data processing, namely to achieve the above ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com