

Lower limb exoskeleton ankle joint device on basis of energy optimization
An energy optimization and exoskeleton technology, applied in the field of rehabilitation training robots, can solve the problems of affecting the wearer's gait, poor wearing comfort, and low energy utilization rate, achieving great application value, good applicability, and reducing energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0023] The preferred embodiment of the energy-optimized lower limb exoskeleton ankle joint device of the present invention is:
[0024] Including calf exoskeleton module, ankle module and sole module connected in sequence;
[0025] The calf exoskeleton module includes calf connecting rod one, connecting motor connecting rod, protective connection block, calf connecting rod two, calf protection rod, connecting bolt, calf connecting rod three, adjustment rod, calf connecting rod four, calf strapping device , Damper connection device;
[0026] The ankle module includes a damper, an ankle strap device, and an ankle link;
[0027] The sole module includes a foot upper panel, a plantar force sensor, a leaf spring lower plate, a leaf spring upper plate, a spring mounting plate, a foot lower plate, a bearing end cover, an I-shaped connecting rod, and an I-shaped Connecting rod 2, angular contact ball bearing, stiffness adjustment motor;
[0028] The damper is connected to the shank...
specific Embodiment
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings.
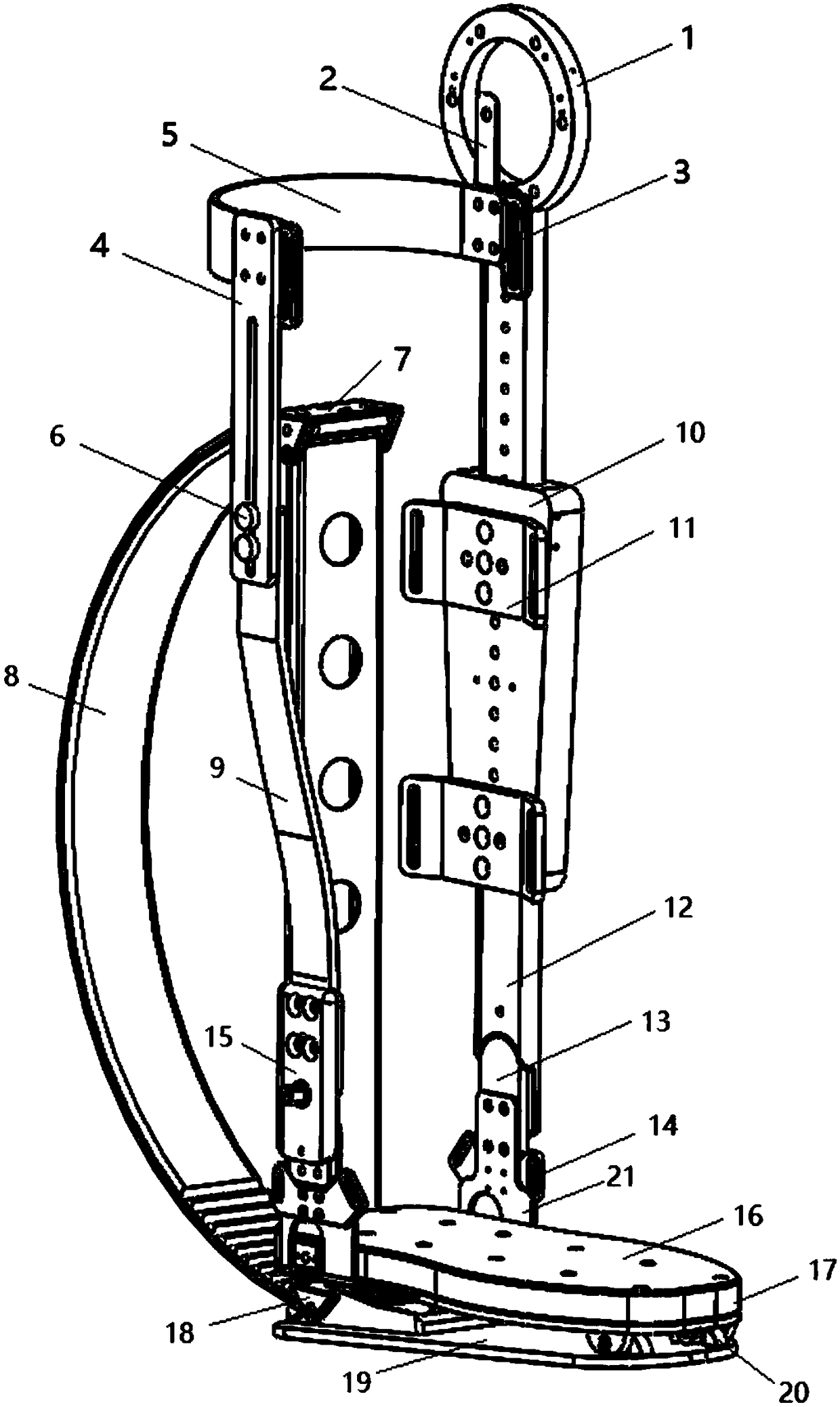
[0043] Such as figure 1 As shown, it includes calf connecting rod 1, motor connecting rod 2, protection connecting block 3, calf connecting rod 2 4, calf protection rod 5, connecting bolt 6, calf connecting rod 3 9, adjustment rod 10, and calf connecting rod 4 12. The calf strapping device 11 and the damper connecting device 15. The calf exoskeleton module is used to fix the human calf, and drives the human calf to move through the drive of the motor. The damper 13, the ankle strap device 14, and the ankle connecting rod 21 are all installed on the ankle module for connecting the calf and the sole of the foot. The damper can buffer the impact of the moment the foot lands when walking, making the walking process smoother; The sole module includes a foot upper wall 16, a foot force sensor 17, a leaf spring pressing piece 18, a spring mounting plate 19, a foot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More