

Cloud platform and its control method, unmanned aerial vehicle
A cloud platform and controller technology, applied in the field of cloud platform, can solve the problems that the camera cannot continue to shoot, the cloud platform swings randomly, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
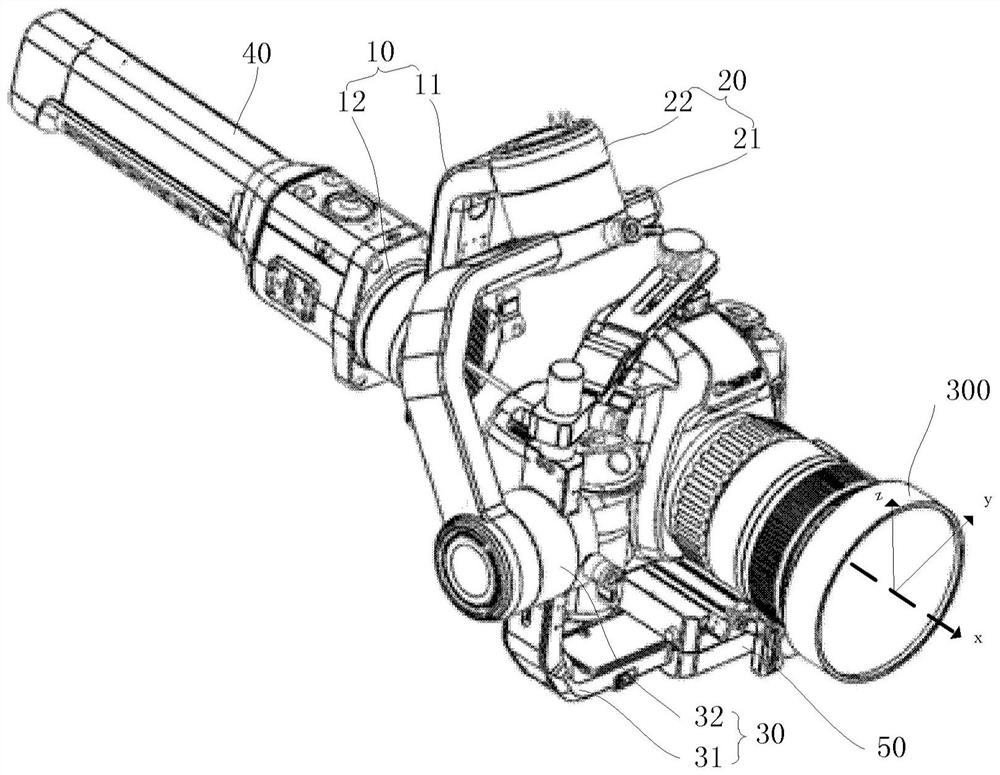
[0022] see figure 1 , Embodiment 1 of the present invention provides a pan / tilt 200 . The pan / tilt 200 of this embodiment is used to carry a load 300. In this embodiment, the load 300 is a camera, such as a camera, a camcorder, an infrared camera, an ultraviolet camera or similar devices. Certainly, in other embodiments, the load 300 may also be an image capture device such as an image sensor. see also figure 1 The gimbal 200 of this embodiment can control the payload 300 to rotate around the x-axis (ie, the roll direction), the y-axis (ie, the pitch direction) and the z-axis (ie, the yaw direction). Wherein, the x-axis, y-axis and z-axis form a three-dimensional Cartesian coordinate system. The rotation of the payload 300 around the y-axis corresponds to the attitude change of the payload 300 in the pitch direction, the rotation of the payload 300 around the z-axis corresponds to the attitude change of the payload 300 in the yaw direction, and the rotation of the payload 3...
Embodiment 2
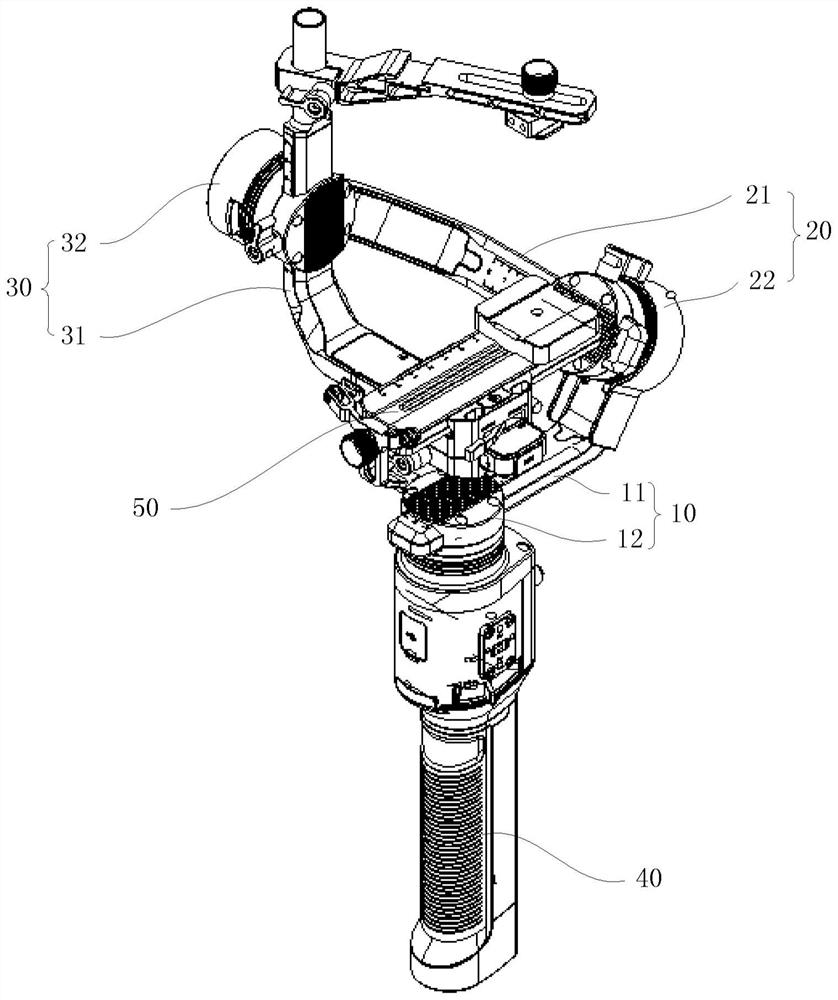
[0044] see Figure 5 , Embodiment 2 of the present invention provides an unmanned aerial vehicle, and the unmanned aerial vehicle may include a fuselage 100, a gimbal 200, and a load 300 mounted on the gimbal 200, wherein the gimbal 200 is the above-mentioned embodiment For the pan / tilt 200 of Example 1, the structure, function, working principle and effect of the pan / tilt 200 can be referred to the description of Embodiment 1, and will not be repeated here.
[0045] In this embodiment, the first motor 12 of the pan / tilt 200 is fixed on the fuselage 100 . Optionally, the first motor 12 is fixed on the bottom of the fuselage 100 through a base.
[0046] The UAV in this embodiment can be a multi-rotor UAV or a non-rotor UAV.
Embodiment 3
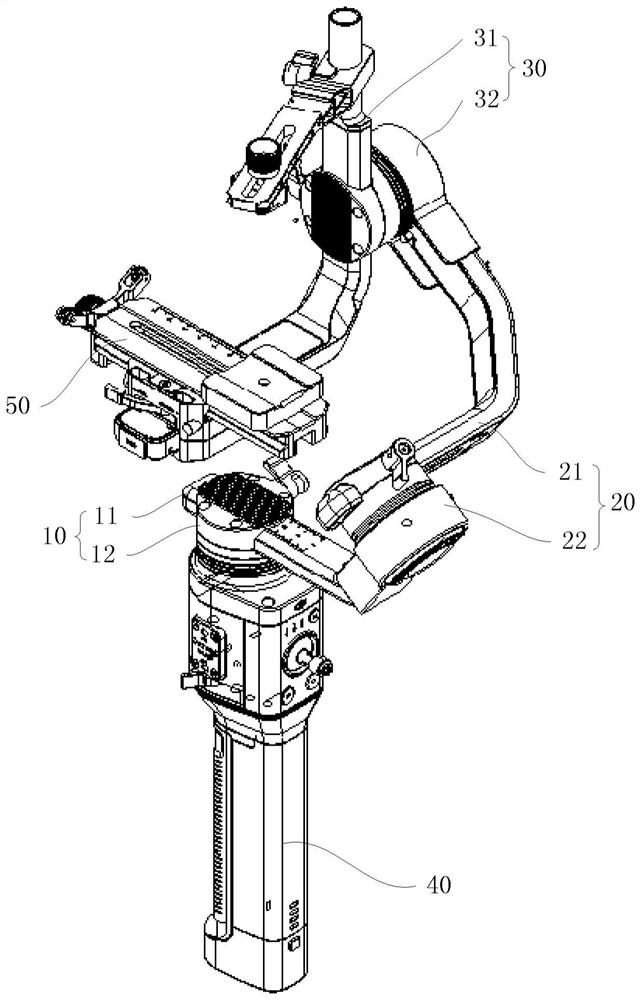
[0048] see Figure 6 , Embodiment 3 of the present invention provides a pan-tilt control method. Wherein, the pan / tilt 200 includes a first shaft assembly 10 , a second shaft assembly 20 , a third shaft assembly 30 and a handle bar 40 . The first shaft assembly 10 includes a first shaft arm 11 and a first motor 12 mounted on one end of the first shaft arm 11, and the second shaft assembly 20 includes a second shaft arm 21 and a first motor 12 mounted on the second shaft arm 11. The second motor 22 at one end of the shaft arm 21, the third shaft assembly 30 includes a third shaft arm 31 and a third motor 32 mounted on one end of the third shaft arm 31, the first shaft arm 11 is far away from the One end of the first motor 12 is fixedly connected to the second motor 22, and one end of the second shaft arm 21 away from the second motor 22 is fixedly connected to the third motor 32, and the third shaft arm 31 is used for carrying The load 300 ; wherein the third motor 32 is a pi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More